नाम रहित दस्तावेज़
विद्युत विमान
6 अगस्त 2009
12 सितंबर 2009 को अद्यतन: विद्युत Cri-Cri का पहला उड़ान। जीन-लूक सौलियर के नियंत्रण में

आज हम जीवन में जिस समय का अनुभव कर रहे हैं, वह विद्युत विमान और विद्युत वाहन के आगमन का समय है। विद्युत वाहन के सफल और असफल प्रयोगों पर एक नज़र डालें:
विद्युत साइकिल के बारे में एक छोटा सा अनुमान, कुछ डेटा के साथ:

बैटरी: पैनासोनिक आयन-लिथियम क्षमता: 8 एएच 26वी स्वतंत्रता: 50 से 70 किमी; 3 स्तरों की सहायता चार्जिंग समय: 3 घंटे मोटर: पेडलियर में, 180 वाट फ्रेम: शहर एल्यूमीनियम; एकमात्र आकार 45 सेमी फॉर्क: स्टील सीट: काइनेटिक व्हील: 26" एल्यूमीनियम ब्रेक: एवी और एआर वी-ब्रेक गियर: नेक्सस 3, स्वचालित स्थानांतरण टायर: 26 x 1,75 आकार: 175 x 65 सेमी भार: 22 किलोग्राम
चीन में साइकिल की बैटरी के दो तत्वों में से एक हटाया जा सकता है। उपयोगकर्ता अपने काम से लौटते समय इसे अपने घर में चार्ज करने के लिए निकालता है। अपने कार्यस्थल पर भी वही करता है। बैटरी की हटाने योग्य प्रकृति वाहन की स्वतंत्रता को बढ़ाती है (जो अपने मॉडल के आधार पर 50 से 70 किमी तक है)। जब हम आदर्श विद्युत वाहन के बारे में सोचते हैं, तो अलग-अलग समस्याएं उठती हैं। ऐसा वाहन दो लोगों के लिए उपयुक्त होना चाहिए, जिससे खरीदारी की जा सके। इस बात को हम भूल जाते हैं कि छोटी कारें जैसे स्मार्ट के मामले में, विद्युत वाहन पूरी तरह से निर्माण नहीं होता है और इसलिए यह खरीदारी के गलियारों में, भूमिगत गलियारों में, आदि में प्रवेश कर सकता है। हम अंतरराष्ट्रीय परिवहन में इस प्रणाली के एकीकरण के बारे में भी सोच सकते हैं।
इसके अलावा, इसे दो अलग-अलग प्रकार के चलने के तरीके देने में कोई समस्या नहीं होती है, जिसमें एक गर्म इंजन प्रणाली आपातकालीन सहायता के रूप में हो। विद्युत बाइक के चीनी त्रिचक्र वाहनों से प्रेरित, मैं व्यक्तिगत रूप से निम्नलिखित चीज़ के लिए सुझाव देता हूँ:

दो-सीट वाला विद्युत त्रिचक्र
यह दो-सीट वाला त्रिचक्र (चीनी संस्करण से प्रेरित) संकरा और कम जगह घेरता है। कारोसरी (चीन में हल्के मिश्र धातु और प्लेक्सी) आंशिक रूप से हटाया जा सकता है। बैटरी एक सामान्य विद्युत साइकिल की तुलना में अधिक है, लेकिन इसमें एक हटाया जा सकने वाला तत्व है, जिसे उपयोगकर्ता कहीं भी ले जा सकता है और चार्ज कर सकता है। हम बूथों या पार्किंग स्थलों में निकासी के लिए बिजली के बिंदुओं की व्यवस्था कर सकते हैं।
बैटरी: पैनासोनिक आयन-लिथियम क्षमता: 8 एएच 26वी स्वतंत्रता: 50 से 70 किमी; 3 स्तरों की सहायता चार्जिंग समय: 3 घंटे मोटर: पेडलियर में, 180 वाट फ्रेम: शहर एल्यूमीनियम; एकमात्र आकार 45 सेमी फॉर्क: स्टील सीट: काइनेटिक व्हील: 26" एल्यूमीनियम ब्रेक: एवी और एआर वी-ब्रेक गियर: नेक्सस 3, स्वचालित स्थानांतरण टायर: 26 x 1,75 आकार: 175 x 65 सेमी भार: 22 किलोग्राम
विद्युत ऊर्जा के भंडारण में पिछले कई दशकों में बहुत उन्नति हुई है, जिसके कारण आज घरेलू सभी विद्युत ड्रिल्स फिर से चार्ज करने योग्य बैटरी पर चलती हैं, जो कुछ दशक पहले असंभव था। चीन इस क्षेत्र में अंतिम स्थान पर नहीं है।
सौर सेंसर के दक्षता में वृद्धि हुई है, 20% से अधिक हो गई है
इस "अत्यंत-अत्यंत हल्के" क्षेत्र में, मैकक्रेडी का नाम तुरंत सभी के मुंह पर आता है।
पॉल मैकक्रेडी
हम तुरंत पूछते हैं कि उनके पीछे क्या अजीब सा वाहन है। यह सिर्फ वह विद्युत गाड़ी है जिससे उन्होंने 1987 में ऑस्ट्रेलियाई सौर गाड़ी प्रतियोगिता में अपने निकटतम प्रतिद्वंद्वी से एक दिन आगे बढ़कर जीत हासिल की थी (…)

पॉल मैकक्रेडी की सौर गाड़ी, 1987, ऑस्ट्रेलियाई प्रतियोगिता में
अधिक नामांकित, तुम मर जाओ। ऑस्ट्रेलिया की यात्रा; 3500 किमी, शीर्ष गति 113 किमी/घंटा
सामने का ढांचा हटाया गया

पायलट की स्थिति और पीछे का ढांचा
जैसा कि देखा जा सकता है, पीछे का ऊपरी हिस्सा पूरी तरह से जुड़े सौर सेलों से बना था। वाहन एक समतल प्लेट पर रखा गया था, जिसमें दृढ़ता थी। वाहन के आकार ने उसे उठाने के लिए बल प्रदान किया, जिससे ट्रेन पर भार कम हो गया।
1925 में पैदा हुए। सोलह वर्ष की उम्र में पहला अकेला उड़ान। 1941: 23 वर्ष की आयु में यूएसए में फ्लाइट स्किल चैंपियन। फ्रांस में विमान उड़ान चैंपियनशिप जीती।
आगे, वह पहली उड़ान वाहन का निर्माण करते हैं जो अपने चालक के मांसपेशियों की ऊर्जा से उड़ान भरता है, गोसमर कॉन्डर।
गोसमर कॉन्डर का तीन दृश्यों में चित्र
मैकक्रेडी ने एक बार अपने स्थान पर एक चिमटा वाला फॉर्मूला चुना, ताकि एक उठाने वाला स्थिरीकरण मिल सके। वास्तव में, एक पंख की उठाने को एक घूर्णन बल के लिए भुगतान करना होता है। मेरी कार्टून कहानी "अगर हम उड़ते तो" को डाउनलोड करें, जो http://www.savoir-sans-frontieres.com पर निःशुल्क उपलब्ध है, साथ ही 350 अन्य कहानियां 33 भाषाओं में।
एक कंपनी जो 3 साल पुरानी है, जिसके बारे में किसी भी मीडिया ने कभी नहीं बताया
भार कम करने के लिए, मैकक्रेडी ने पंख के आगे के शरीर पर तारों का उपयोग किया, जिससे लंबाई घट गई, जिसे अब केवल विक्षेपण बल को सहन करना था।

गोसमर कॉन्डर: पहली मानव उड़ान
एक साइकिल के बराबर तेज.....

गोसमर अल्बाट्रॉस चैनल को पार करता हुआ
ये सभी उड़ानें "जमीन के प्रभाव" के साथ की गईं। साइकिल चालक एक डैलर के माध्यम से नियंत्रित करता था, जो पहले एक आधार प्रदान करता था, फिर अग्र उड़ान विमान की उठान को समायोजित करता था, और अंत में इस उड़ान विमान को झुकाकर हल्के विक्षेपण करता था। पंखों की झुकाव अपने आप बनाई गई थी। इसमें कोई एलरॉन नहीं थे। लेकिन मशीन को तीव्र झुकाव के साथ मोड़ने के लिए डिज़ाइन नहीं किया गया था।
पॉल मैकक्रेडी की मशीनों के उपलब्धियों के वीडियो
आगे, 1974 में सौर ऊर्जा से चलने वाली पहली उड़ान, जिसमें मार्क रेडी के बेटे, 13 वर्ष, 40 किलोग्राम, गोसमर पेंगुइन पर सवार थे, जिसमें 3900 सौर सेल निकल-कैडमियम थे, जो 500 वाट उत्पन्न करते थे। वाहन का खाली भार: 34 किलोग्राम। एक कैटापल्ट इसे जमीन से उठाने में मदद करता था।
पहली सौर ऊर्जा से चलने वाली उड़ान, 1974। अभी भी साइकिलें और जमीन का प्रभाव
पहला मानव जो सौर ऊर्जा के उपयोग से उड़ान भरा: मैकक्रेडी के बेटे, 13 वर्ष

मार्शल, 13 वर्ष, उड़ान में
लेकिन अब नासा का रोल ले लिया गया और मैकक्रेडी को 1981 में सोलर चैलेंजर को उड़ाने में सहायता मिली। शक्ति: 2.5 किलोवाट
पॉल मैकक्रेडी का सोलर चैलेंजर
यहाँ चीजें पूरी तरह से बदल गईं। हम एक अधिक घने आकार को देखते हैं, जो अस्थिरता के हमले का सामना करने के लिए डिज़ाइन किया गया है।
पार्श्व दृश्य से देखा गया। हम देखते हैं कि इसमें एलरॉन हैं।
वाहन के पीछे के हिस्से में एक विक्षेपण प्रोफ़ाइल है, जो पंख के घूर्णन बल को संतुलित करता है। ऊपरी हिस्सा पूरी तरह से समतल है और बड़ी मात्रा में सौर पैनलों को धारण करता है।
सोलर चैलेंजर, ऊपर से दृश्य
यह निरंतर हिस्सा पैनलों को धारण करता है। गतिशील हिस्सा एक सफेद पट्टी के रूप में दिखाई देता है और इसमें कोई पैनल नहीं है। 300 किमी की दूरी पर फ्रांस से अंग्रेजी के बीच उड़ान भरते हुए, यह वाहन जुलाई 1981 में 5 घंटे 23 मिनट तक हवा में रहा। गोसमर पेंगुइन से तीन गुना भारी (पायलट के बिना), 16,000 सौर सेलों वाला, दो इलेक्ट्रिक मोटरों के साथ, जो टैंडम में व्यवस्थित हैं, प्रत्येक 3 घोड़े की शक्ति उत्पन्न करते हैं, समारियम-कोबाल्ट में स्थायी चुंबकों के साथ। वाहन नए सामग्री के सभी प्रगति का उपयोग करता है, जिसमें भार के लिए अच्छा ताकत अनुपात होता है, और एक चर घूमने वाली प्रोपेलर से लैस होता है।
गुणवत्ता में काफी बढ़ोतरी हुई है।
सामग्री के उच्च प्रौद्योगिकी वाले उपयोग के संबंध में, हम देखते हैं कि लंबे समय तक और लंबी दूरी की सौर उड़ान पूरी तरह से संभव हो गई है, जिसमें मशीन की रेखाएं आम विमान के बहुत करीब हैं, उदाहरण के लिए एलांगेशन के मामले में। लेकिन यह वह चीज़ नहीं है जो मैकक्रेडी को अब रुचि देती है। वह अब एक निर्माण यान, एक "UAV" (अनमैन्ड एयरियल व्हीकल), के बारे में सोचता है, जो दिन में उच्च ऊंचाई तक पहुंच सकता है: 30 किलोमीटर, रात में थोड़ा नीचे उड़ान भरकर या एक हिस्सा विद्युत ऊर्जा को वापस करके, जो उसे अनंत समय तक हवा में रहने की अनुमति देता है।
फिर वह "बिना पीछे के हिस्से" वाले उच्च एलांगेशन वाले वाहन की ओर बढ़ता है, जहां तेज हवाओं को लंबाई की लचीलापन द्वारा सहन किया जाता है, जो एक बड़े डाइएड्रल की अनुमति देता है। वाहन की स्थिरता एक बोर्ड कंप्यूटर के द्वारा संभाली जाती है, जो उड़ान के पूरे छोर के बल्कि एलांगेशन में विभिन्न फ्लैप्स के साथ काम करता है, जो एयरोएलास्टिसिटी के प्रभावों को नियंत्रित करने के लिए उत्तरदायी है।
****पूरा प्रोजेक्ट (अंग्रेजी में पीडीएफ)
30 किमी की ऊंचाई (100,000 फुट) वास्तव में प्राप्त की गई है। सौर सेंसर की दक्षता 20% से अधिक है। वाहन अपने आप उड़ान भर सकता है। विभिन्न फॉर्मूले को एक के बाद एक लागू किया गया, जैसे "पूरी तरह से सौर" से लेकर मिश्रित प्रणाली तक, जहां वाहन बैटरी में ऊर्जा ले जाता है या हाइड्रोजन फ्यूल सेल के माध्यम से विद्युत ऊर्जा उत्पन्न करता है।
1990 के दशक के मध्य में, नासा ने ड्राइडेन केंद्र से Dryden पर एक ERAST (पर्यावरणीय अनुसंधान विमान और सेंसर प्रौद्योगिकी) कार्यक्रम शुरू किया। अध्ययन और अनुसंधान मैकक्रेडी द्वारा स्थापित Aero Vironment कंपनी द्वारा किए गए।
पहला वाहन पाथफाइंडर था। 30 मीटर की फैलाव, छह मोटर। बैटरी पर उड़ान के बाद यह सौर सेंसर के माध्यम से आगे बढ़ता है। 1995 में इसने 17,000 मीटर की ऊंचाई प्राप्त की, और 1997 में 23,000 मीटर।

पाथफाइंडर: 30 मीटर की फैलाव, आठ मोटर
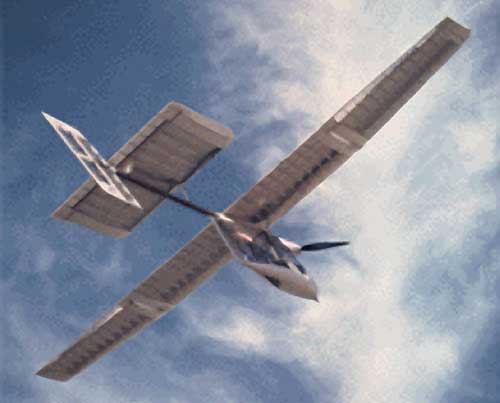
एक पंख केवल एक घूर्णन बल के लिए उठाने के लिए उपयोग करता है, जिसे संतुलित करने की आवश्यकता होती है। इस प्रकार के मशीन के पंख के प्रोफ़ाइल विकासशील हैं। पंख का केंद्रीय हिस्सा सबसे "उठाने वाला" है और एक सकारात्मक बंकन वाला है। पंख के छोर एक स्व-स्थिर प्रोफ़ाइल, एस-आकार में हैं, जो इस तस्वीर में अच्छी तरह से दिखाई देते हैं। इन पंख के तत्वों के कारण उठान कम होती है। यही वह समाधान है जिसे मैकक्रेडी ने "बिना पीछे के हिस्से" वाले फॉर्मूले के लिए अपनाया, जो एक बड़े एलांगेशन वाली एकल उड़ान वाली पंख के रूप में है। हमने अधिक नियंत्रण के बारे में भरोसा किया, शायद थोड़ा अधिक।
पाथफाइंडर के पार्श्व दृश्य में डाइएड्रल दिखाता है
नासा अब प्रोटोटाइप सेंचुरियन (1996-1998) के ओर बढ़ता है, जिसमें चौदह मोटर, सत्तर मीटर की फैलाव, 100,000 फुट (तीस किलोमीटर) की ऊंचाई प्राप्त करने के लिए डिज़ाइन किया गया है।
सेंचुरियन (1996 - 1998 -)। सत्तर मीटर की फैलाव, चौदह इलेक्ट्रिक मोटर।
फोटो नीचे से ली गई है। प्रोफ़ाइल के पीछे के हिस्से में स्पष्ट रूप से, आधार पर बहुत पतली नर्वचुरी दिखाई देती है। इससे यह अनुमान लगाया जा सकता है कि यह वाहन के पंखों के गुणों के मूल्यांकन के लिए गुणवत्ता के परीक्षण के बारे में है, जबकि महंगे सौर सेंसर के अभाव में। ऊपरी और निचले भाग को केवल एक पतला माइलर फिल्म से ढका गया है, जैसा कि मैकक्रेडी द्वारा पहले बनाए गए वाहनों में था।
और अब क्या दिखाई देता है?
हम चौदह इलेक्ट्रिक मोटरों को देखते हैं, जो अपने दो मीटर व्यास वाले दो-पत्ती वाले प्रोपेलरों के साथ काम कर रहे हैं, जो शायद बैटरी द्वारा संचालित हैं, जो छोटे उड़ानों के लिए तैयार हैं। प्रत्येक मोटर 1.5 किलोवाट उत्पन्न करती है। पंख का आगे का चौथाई हिस्सा अपारदर्शी है। यहां मुख्य संरचना, लंबाई वाले तत्व का तत्व होगा। इस लंबाई के आगे, नर्वचुरी का विस्तार, जिसमें एक हल्का एज बॉर्डर, एक एक्सपेंडेड पॉलीस्टाइरीन (माइलर से लपेटा गया स्टायरोफोम) है, जैसा कि पिछले वाहनों में है।
जैसा कि हम आगे देखेंगे, सौर सेंसरों और अभी भी चौदह मोटरों के साथ, सेंचुरियन मशीन को एक अतिरिक्त केंद्रीय तत्व के साथ जोड़कर हेलियस HP01 में परिवर्तित किया गया, जिसमें सौर सेंसर थे, जिसे अधिकतम तक हल्का किया गया था (1160 किलोग्राम, वायु भार 5 किलोग्राम प्रति वर्ग मीटर), जिसे बनाया गया था ताकि यह देखा जा सके कि क्या सौर ऊर्जा से संचालित मोटरीकरण के माध्यम से बहुत ऊंचाई प्राप्त की जा सकती है। परीक्षण सफल (30 किलोमीटर की ऊंचाई)।
जैसा कि हम आगे देखेंगे, HP03 संस्करण अपनी दूसरी उड़ान में टूट गया, और हम देखेंगे कि कैसे। तैरते हुए टुकड़ों के बढ़ावे से हम लंबाई को देख सकते हैं, जिसका आकार लगभग बेलनाकार और नर्वचुरी वाला दिखाई देता है। मुझे लगता है कि मैकक्रेडी ने इस लंबाई में अपनी मशीन की सभी यांत्रिक प्रतिरोधक क्षमता को केंद्रित कर दिया, शेष हिस्सा केवल एक आवरण था। जब हम इस पंख को देखते हैं, जिसकी फैलाव चौंकाने वाली है (एलांगेशन: 30), जिसमें कोई तार नहीं है, हम प्रश्न उठा सकते हैं कि यह कैसे एयरोएलास्टिसिटी के घटना का सामना कर सकता है। इस घटना को समझना आसान है। किसी भी तेज हवा में, पंख के छोर उठ सकते हैं। स्थानीय अवधि अधिक हो जाती है। पंख का हिस्सा ऊपर उठता है, विक्षेपित होता है। फिर संरचना के यांत्रिक, लचीले प्रतिक्रिया की ओर जाता है, जो उसे अपनी मूल स्थिति में वापस लाने की कोशिश करता है। परिणामस्वरूप मशीन "पंख फड़काती है" और इस स्थिति को टूटने तक बढ़ाया जा सकता है।
अनेक विमान निर्माताओं ने इस प्रकार की दुर्घटनाएं अलग-अलग मशीनों में अनुभव की हैं। उड़ान के शुरुआती दिनों में, समाधान तारों के उपयोग के माध्यम से आया, जो प्रतिरोध उत्पन्न करता था। यह तब तक नहीं हुआ जब तक आंतरिक संरचना की यांत्रिक गुणवत्ता में सुधार नहीं हुआ। नासा की मशीनों में कोई तार नहीं है। हम प्रश्न उठा सकते हैं कि क्या लंबाई अकेले पंख के "फ्लैटर" से जुड़े सभी बलों का विरोध कर सकती है। ऐसा लगता है कि मुश्किल है।
एक और तरीका है इस घटना को संभालने के लिए: पंख को "सक्रिय" और "बुद्धिमान" बनाना। नीचे दिए गए चित्र में हम देखते हैं कि मशीन अपने "पिच रेट" (प्रति सेकंड अवधि में परिवर्तन) को रिकॉर्ड करती है, जो नियंत्रण के लिए एक महत्वपूर्ण डेटा है। पंख लंबाई के बल्कि स्थान पर त्वरण के कोणीय रूप में अनुभव करने वाले सेंसर से भरा है। सभी यह एक कंप्यूटर को भेजा जाता है, जो अग्रिम रूप से और तुरंत एक पूरी श्रृंखला के 72 फ्लैप्स को नियंत्रित करता है, जो पूरे छोर के बल्कि (एक इकाई लंबाई: एक मीटर) को सजाते हैं। ये फ्लैप्स केवल मशीन के रोलिंग नियंत्रण के लिए नहीं हैं, बल्कि फ्लैटर के सभी प्रवृत्ति का विरोध करते हैं, जो खतरनाक पंखों के फड़कने के लिए जिम्मेदार है। अंग्रेजी में "फ्लैटर" का अर्थ है पंखों का फड़कना (एक पक्षी के पंखों का)।
मशीन के मोड़ में नियंत्रण इस तरह से किया जाता है कि मोटरों को दी गई शक्ति के अंतर को नियंत्रित किया जाता है (उड़ान में: प्रति मोटर 1.5 किलोवाट)। इसलिए ऊर्ध्वाधर उड़ान विमान की आवश्यकता नहीं है। रोलिंग मशीन के स्वयं बनाए गए "रोलिंग इंड्यूस्ड" (मोड़ में बाहरी पंख की गति कम हो जाती है) के कारण होता है। मशीन की गति 38 फुट प्रति सेकंड है, यानी 45 किमी/घंटा।
अमेरिकी विमानन को इस समस्या का सामना करना पड़ा था कई दशक पहले, जब उन्होंने अपने सबसे बड़े सैन्य विमान को सेवा में लाने की कोशिश की (मुझे लगता है कि यह लूकीड गैलेक्सी था)। हालांकि इसे अधिक सावधानी से डिज़ाइन किया गया था, लेकिन वाहन को एयरोएलास्टिसिटी के एक घटना के प्रति संवेदनशील पाया गया, जो हवा में "पंख फड़काते हुए" उड़ान भरता था। गति नहीं बहुत अधिक थी: पंख के छोर पर एक मीटर से कम। लेकिन इन बार-बार विक्षेपण अप्रत्याशित थे, जिससे सामग्री के थकावट के कारण पंख की जीवन अवधि में भारी कमी आई।
दो समाधान थे:
- पंख को शुरू से फिर से बनाना (बहुत महंगा)
- इस फ्लैटर के प्रभाव को रोकने वाले फ्लैप्स लगाना
दूसरा समाधान अपनाया गया। अमेरिकियों को उस दिन से विमान के पंखों के आकार के सक्रिय नियंत्रण का अच्छा अनुभव मिला, जिसमें फ्लैप्स का उपयोग किया गया था, जो एक संग्रह "एक्सीलेरोमीटर + कंप्यूटर" द्वारा नियंत्रित होते थे। पाठक के लिए स्पष्ट होना चाहिए कि ऐसा नियंत्रण मैन्युअल रूप से नहीं किया जा सकता है। बहुत संवेदनशील एक्सीलेरोमीटर छोटे स्थानीय परिवर्तन (या विक्षेपण) का अनुभव करते हैं और तुरंत फ्लैप्स को सक्रिय करके उस गति को रोकते हैं, जिसे कोई मानव इतनी तेजी से नहीं कर सकता। बोर्ड पर एक शक्तिशाली कंप्यूटर के बिना, हेलियस मशीन (पूर्व सेंचुरियन) बस उड़ नहीं सकती थी।
इस पहलू के कारण ऐसी मशीन के "पायलट" की हस्तक्षेप क्षमता बहुत सीमित हो जाती है, जो केवल यह नियंत्रित कर सकता है कि "सब कुछ ठीक चल रहा है"। इसे लगातार नियंत्रण में नहीं समझना चाहिए। यह सब कुछ तभी काम करता है जब सभी को गणना द्वारा योजना बनाई गई हो और उचित रूप से प्रोग्राम किया गया हो। लेकिन हेलियस HP03 के विनाश में हम देखेंगे कि एक अन्य प्रकार की अस्थिरता, टैंगिंग में, जो पहले से ही योजना बनाई गई थी, उसके प्रभावों और उसके विकास की गति के बारे में नीचे आंकलन किया गया था, जिसके कारण बोर्ड प्रणाली समय पर इसका विरोध नहीं कर पाई। यदि कंप्यूटर अस्थिरता के आरंभ के लिए उचित आदेश दे सकता है; पहले चरण में, दूसरा "हवा" वाहन को अपने उड़ान क्षेत्र से बाहर निकाल देता है, बहुत तेजी से। लेकिन यहाँ मैं आगे बढ़ रहा हूँ।
आइए लंबाई के सिलेंडरिक डिज़ाइन पर वापस लौटें। यह दो प्रकार के बलों के अधीन है:
- विक्षेपण में
- टॉर्शन में
फ्लैटर, एयरोएलास्टिसिटी के घटना में, लंबाई सभी दिशाओं में बल के अधीन होती है। एक तेज हवा में स्थानीय अवधि में परिवर्तन, ऊपर-नीचे की दिशा में विक्षेपण बल के कारण होता है। लेकिन स्थानीय रूप से भी, प्रतिरोध में परिवर्तन आगे-पीछे के बल के उत्पादन का कारण बनता है। ऐसे में सिलेंडरिक आकार सभी दिशाओं में विक्षेपण बलों को सहन करने के लिए सबसे अच्छा है।
लेकिन एयरोडायनामिक्स जानता है कि उठान में परिवर्तन घूर्णन बल में परिवर्तन के कारण होता है (मेरी कार्टून कहानी एस्पिरिसौफल देखें)। इस स्थानीय घूर्णन बल में परिवर्तन बहुत हानिकारक टॉर्शन बल के उत्पादन का कारण बनता है, जो लंबाई बहुत लंबी होने के कारण और अधिक खतरनाक होता है। मुझे लगता है कि जब हम इस लंबाई को नंगे देखते हैं, तो यह चक्रीय नर्वचुरी दिखाई देती है, जो इस सिलेंडरिक लंबाई के आगे फ्लैम्बेज के प्रसार को रोकने के लिए है। निश्चित रूप से, अगर कंप्यूटर विक्षेपण के किसी भी गति के तुरंत प्रतिक्रिया नहीं देता है, तो लंबाई के टूटने की गारंटी है।
लंबाई
मेरी राय में, केवल पूर्ण सक्रिय नियंत्रण ही मशीन को उड़ान भरने और अस्थिरता और आपातकालीन वायु प्रवाह के साथ सामना करने में सक्षम बनाता है, जो ... हर ऊंचाई पर होते हैं। निचली परतों में, 5000 मीटर तक, और शायद उच्च ऊंचाई पर, अनपेक्षित रूप से, भले ही जेट स्ट्रीम के बड़े मार्गों में। नीचे दी गई तस्वीर में हम देखते हैं कि हेलियस की उड़ान मौसम की स्थिति में बहुत शांत नहीं है। हेलियस HP03 के दुर्घटना के समय, एक अन्य तस्वीर देखें, हम दूर एक क्यूमुलोनिम्बस के निर्माण को देखते हैं। हम जून में हैं, ग्रीष्म ऋतु में नहीं, और उड़ान उत्तरी गोलार्ध में हो रही है। यदि परीक्षण शीत ऋतु में किए जाते, अधिक शांत हवा वाले वातावरण में, तो वे शायद इतनी तेजी से और इतनी बुरी तरह से समाप्त नहीं होते (दूसरी उड़ान में)।
लेकिन नासा केवल हेलियस HP01 के साथ प्राप्त ऊंचाई के रिकॉर्ड को नहीं लक्ष्य बनाती है, बल्कि एक ऐसी मशीन के विकास का लक्ष्य रखती है जो हर समय उपलब्ध हो, जो पूरे वर्ष में, हर अक्षांश में, 15 से 30 किमी की स्ट्रैटोस्फेरिक ऊंचाई पर, नॉन-स्टॉप उड़ानों के लिए सेवा कर सकती है।
फिर सेंचुरियन प्रोटोटाइप को एक केंद्रीय तत्व के साथ बदला गया, जिससे इसकी फैलाव 82 मीटर हो गई, अभी भी चौदह मोटरों के साथ। यह अब हेलियस HPO1 बन गया, जिसका उद्देश्य बहुत ऊंची ऊंचाई पर �
हेलियोस के दुर्घटना रिपोर्ट दुर्घटना रिपोर्ट काफी भ्रमपूर्ण है। मेरे व्यक्तिगत रूप से लगता है कि एक ऐसे स्टेबलाइजर को जोड़ना, जो पिचिंग मोमेंट ऑफ इनर्शिया को नहीं बढ़ाए, लेकिन इस अस्थिरता के खिलाफ "डैम्पिंग" पैदा करने के लिए पर्याप्त सतह का हो, एक ऐसा समाधान था जिसे कम से कम विचार में लिया जाना चाहिए। यह सच है कि मैकक्रेडी का नाम इस रिपोर्ट में नहीं आता है। नीचे दिए गए चित्र में पिचिंग मोमेंट ऑफ इनर्शिया के बढ़ने का विकास डायेड्रल के साथ होता है।
ऊपर, दुर्घटना की रीडिंग। ग्राफ के मध्य में पहली बार डायेड्रल में वृद्धि होती है, जिसे कंप्यूटर संभाल लेता है। फिर दस मिनट बाद (कुल उड़ान काल: तीस मिनट) अस्थिरता का फिर से उदय होता है। डायेड्रल 30 फीट (दस मीटर) से अधिक हो जाता है। विमान "पंखों को हिलाने लगता है" (एयरोएलास्टिक अस्थिरता)। पिचिंग में तेजी से दोलन (नीचे की रेखा) फिर गति 60 फीट/सेकंड से अधिक हो जाती है।
वहाँ, हवाई बलों के कारण एलांग के किनारों पर फैले गए हैं और पंखों की जुड़ाव भी अलग हो जाती है, और कुछ सेकंड में बस... लंगर बचता है। रिपोर्ट कहती है कि "कंप्यूटर द्वारा गणना किए गए अनुमान में अस्थिरता के इतनी तेजी से और तीव्रता से विकास की उम्मीद नहीं थी।"
निष्कर्ष: इस तरह के विमान को उड़ाने में लगे जोखिम केवल पंखों के लंगर के टूटने के खतरे पर केंद्रित नहीं हैं। एयरोएलास्टिक अस्थिरता भी इतनी ही आपदाग्रस्त भूमिका निभा सकती है।
सौर विमान के क्षेत्र से बाहर निकलकर, हम इलेक्ट्रिक विमान के क्षेत्र में आते हैं, जो बैटरी में संग्रहीत ऊर्जा के कारण उड़ता है। यह एक तेजी से विकसित हो रहा बाजार है। इस मामले में कुछ महत्वपूर्ण बिंदु पहले से ही निर्धारित हो चुके हैं। यादगार के लिए, फ्रांसीसी एकल सीट वाले विमान का पहला उड़ान 2007 के दिसंबर में हुआ:

फ्रांस में पहली बार: इलेक्ट्रिक विमान का उड़ान लेना
23 दिसंबर, 2007
****इलेक्ट्रिक मोटराइजेशन वाले विमानों के प्रमोशन के लिए संघ
यह एक विश्व प्रथम है, APAME ने 25 घोड़े की शक्ति के इलेक्ट्रिक मोटर और लिथियम-पॉलिमर बैटरी के साथ F-WMDJ इलेक्ट्रा विमान का पहला उड़ान लेने में सफलता हासिल की।
यह पहला उड़ान 23 दिसंबर को हाई-अल्प्स के एस्प्रेस सुर ब्यूच में एयरोड्रोम से शुरू हुआ। 48 मिनट के उड़ान के दौरान, इलेक्ट्रिक विमान ने बंद चक्कर में 50 किमी की दूरी तय की।
यह शौकीन उड़ान के क्षेत्र में अद्वितीय अनुभव है, जो 15 से 50 घोड़े की शक्ति के लिए आवश्यक विमानों के लिए वर्तमान थर्मल मोटरों के लिए अनुपम विकल्प प्रदान करता है।
उपकरण की विशेषताएँ:
एकल सीट फैलाव: 9 मीटर लंबाई: 7 मीटर बैटरी के बिना खाली भार: 134 किग्रा अधिकतम अनुमत उड़ान भार: 265 किग्रा क्रूज़िंग गति: 90 किमी/घंटा फाइनेस: 13 लकड़ी और कपड़े के निर्माण प्रकार इलेक्ट्रिक मोटर-प्रोपल्शन समूह की विशेषताएँ:
उद्योग के लिए निर्मित 18 किलोवाट (25 घोड़े की शक्ति) ब्रश वाला डीसी मोटर पावर इलेक्ट्रॉनिक्स जो इस उपयोग के लिए विशेष रूप से विकसित की गई है लिथियम-पॉलिमर बैटरी (कुल भार: 47 किग्रा) जमीन पर नियंत्रित घूमने वाली हेलिक्स ARPLAST इस मोटराइजेशन के लिए अनुकूलित बोर्ड, पावर कंट्रोल, मोटर फ्रेम, मोटर फ्लैश आदि विशेष रूप से इस उपकरण के लिए विकसित और निर्मित हैं। APAME के बारे में: 2007 में एन लाव्रांड की अध्यक्षता में स्थापित नवीनतम संघ, APAME का उद्देश्य इलेक्ट्रिक मोटराइजेशन वाले विमानों के डिजाइन, निर्माण और उपयोग को बढ़ावा देना है। इसका दायरा एक छोटे इलेक्ट्रिक विमान के विकास का लक्ष्य था। अगस्त में, APAME ने पहले ही एक ULM ( ) को "चुपचाप उड़ान" भरी थी।
APAME से संपर्क करें फोन: 04 92 57 99 40 फैक्स: 04 92 57 99 41 वेबसाइट:
यह एक विश्व प्रथम है, APAME ने 25 घोड़े की शक्ति के इलेक्ट्रिक मोटर और लिथियम-पॉलिमर बैटरी के साथ F-WMDJ इलेक्ट्रा विमान का पहला उड़ान लेने में सफलता हासिल की।
यह पहला उड़ान 23 दिसंबर को हाई-अल्प्स के एस्प्रेस सुर ब्यूच में एयरोड्रोम से शुरू हुआ। 48 मिनट के उड़ान के दौरान, इलेक्ट्रिक विमान ने बंद चक्कर में 50 किमी की दूरी तय की।
यह शौकीन उड़ान के क्षेत्र में अद्वितीय अनुभव है, जो 15 से 50 घोड़े की शक्ति के लिए आवश्यक विमानों के लिए वर्तमान थर्मल मोटरों के लिए अनुपम विकल्प प्रदान करता है।
उपकरण की विशेषताएँ:
एकल सीट फैलाव: 9 मीटर लंबाई: 7 मीटर बैटरी के बिना खाली भार: 134 किग्रा अधिकतम अनुमत उड़ान भार: 265 किग्रा क्रूज़िंग गति: 90 किमी/घंटा फाइनेस: 13 लकड़ी और कपड़े के निर्माण प्रकार इलेक्ट्रिक मोटर-प्रोपल्शन समूह की विशेषताएँ:
उद्योग के लिए निर्मित 18 किलोवाट (25 घोड़े की शक्ति) ब्रश वाला डीसी मोटर पावर इलेक्ट्रॉनिक्स जो इस उपयोग के लिए विशेष रूप से विकसित की गई है लिथियम-पॉलिमर बैटरी (कुल भार: 47 किग्रा) जमीन पर नियंत्रित घूमने वाली हेलिक्स ARPLAST इस मोटराइजेशन के लिए अनुकूलित बोर्ड, पावर कंट्रोल, मोटर फ्रेम, मोटर फ्लैश आदि विशेष रूप से इस उपकरण के लिए विकसित और निर्मित हैं। APAME के बारे में: 2007 में एन लाव्रांड की अध्यक्षता में स्थापित नवीनतम संघ, APAME का उद्देश्य इलेक्ट्रिक मोटराइजेशन वाले विमानों के डिजाइन, निर्माण और उपयोग को बढ़ावा देना है। इसका दायरा एक छोटे इलेक्ट्रिक विमान के विकास का लक्ष्य था। अगस्त में, APAME ने पहले ही एक ULM ( ) को "चुपचाप उड़ान" भरी थी।
APAME से संपर्क करें फोन: 04 92 57 99 40 फैक्स: 04 92 57 99 41 वेबसाइट:
एकल सीट, 25 घोड़े की शक्ति, 48 मिनट और 50 किमी बंद चक्कर में 90 किमी/घंटा की गति ---
पहला वाणिज्यिक इलेक्ट्रिक पर्यटन विमान है.....अंग्रेजी-चीनी
http://www.avem.fr/actualite-le-premier-avion-electrique-commercialise-en-2010-874.html


**यूनीक ई 430 एक सह-सीट दो सीट वाला विमान है, जिसमें बहुत अच्छी एरोडायनामिक्स है। **
पंख में उच्च विस्तार है, जो प्रतिरोध के कम होने का संकेत है।

उच्च विस्तार (विंगलेट्स के साथ) लेकिन हैंगर में आसानी से स्थापित करने योग्य
दिलचस्प बात यह है कि दो लोगों के साथ उड़ान की अवधि में प्रदर्शन, 90 किमी/घंटा की अधिकतम गति के साथ:
दो घंटे
कीमत घोषित: 65,000 यूरो, जो एक दो सीट वाले पर्यटन विमान के लिए अधिक नहीं है। यह चीन में बनाया गया है, लेकिन वहाँ इसका व्यावसायिक उपयोग नहीं किया जा सकता है। वास्तव में, चीनी आकाश शौकीन उड़ान के लिए खुला नहीं है।
यहाँ हम छोटे पर्यटन विमान के उपयोग की सीमा में हैं, जो शिक्षा और स्थानीय उड़ानों के लिए उपयोगी हो सकते हैं। इसकी रेखाएँ और विमान का उच्च विस्तार, मोटर वाले क्री क्री के विपरीत, विमान को एक मोटोप्लेनर (कम शक्ति वाला मोटर, या तीन पत्तियों वाली हेलिक्स जो झंडे के रूप में लगी हो) के समान दिखता है। यह निश्चित रूप से अपने स्वयं के साधनों से उड़ान भरता है।
जीन-लुई सुलियर द्वारा मूल्यांकन
: " हम 450 किग्रा के अधिकतम वजन वाले वर्ग में हैं (अंतरराष्ट्रीय ULM दो सीट वाले वर्ग)। लगभग 120 किग्रा विमान, 150 किग्रा यात्री, 180 किग्रा बैटरी, संभवतः लिथियम-पॉलिमर, जिसकी प्रति किलोग्राम 0.2 किलोवाट-घंटा क्षमता है। 18 किलोवाट की औसत शक्ति इस तरह के मोटोप्लेनर को उड़ान भरने के लिए पर्याप्त है। इसलिए 2 घंटे की सीमा है।
मुझे लगता है कि इलेक्ट्रिक मोटोप्लेनर के क्षेत्र में भविष्य है, संभवतः सौर सेंसर के माध्यम से ऊर्जा के आपूर्ति के साथ। मोटराइजेशन के मामले में, हम एक जर्मन मशीन, स्टेम्मे S10 के बारे में सोचते हैं, जिसमें हेलिक्स पूरी तरह से एक आगे के कवर में समाया जा सकता है, और अपने घूर्णी बल के प्रभाव से खुलता है।

**स्टेम्मे S10, दुनिया का सर्वश्रेष्ठ मोटोप्लेनर। दो सीट वाला, हेलिक्स रिट्रैक्टेबल। 85 किलोवाट (थर्मल) मोटर पंख के नीचे। हवा के प्रवेश को देखा जा सकता है, खुला हुआ है। विद्युत रूप से रिट्रैक्टेबल ट्रेन। अधिकतम गति 270 किमी/घंटा, विस्तार: 30। फैलाव: ... 23 मीटर! डिस्माउंटेबल और ट्रॉली पर परिवहन करने योग्य। फाइनेस पच्चीस से अधिक है। **
पूर्ण टैंक के साथ, तय की जा सकने वाली दूरी ... हजार किमी से अधिक है। लेकिन मिनी स्टोर में ले जाने वाला सामान ... प्रतीकात्मक (दो के लिए ब्रश और पायजामा)। यहाँ एक वीडियो है जो
स्टेम्मे S10 को उड़ाते हुए दिखाता है
मेरे मित्र जैक्स के अनुसार, जिनके पास एक है (मैंने भी विनोन में स्थित इस मशीन पर उड़ान भरी है), एक रिट्रैक्टेबल हेलिक्स, उत्कृष्ट गुणवत्ता वाले प्लेनर के रूप में प्रदर्शन, इलेक्ट्रिक मोटराइजेशन, सौर सेंसर के साथ एक दिलचस्प फॉर्मूला हो सकती है। जैसे ईटीए, स्टेम्मे को अपने स्वयं के साधनों से उड़ान भरने की आवश्यकता होती है (लेकिन इसे लंबे टर्मिनल की आवश्यकता होती है! उसकी ऊपर उठने की गति बहुत कम है)। इससे उपयोगकर्ता को एक ट्रैक्टर विमान की आवश्यकता के बारे में छुटकारा मिलता है।
मेरे मित्र जैक्स लेगलैंड, एक शुद्ध उड़ान वाले प्रेमी, केवल उड़ान के लिए अपने मोटर का उपयोग करते हैं। लेकिन ऊपर, उतार-चढ़ाव वाले क्षेत्रों का सामना करना पड़ सकता है, और मुझे याद है कि वेर्डन की घाटियों के ऊपर एक चक्कर लगाने के बाद, हमें सुरक्षा के अच्छे मार्जिन के साथ भूमि पर वापस आने के लिए मोटर का उपयोग करना पड़ा।
स्टेम्मे के अन्य मोटोप्लेनरों की तुलना में लाभ, जिनकी हेलिक्स उड़ान के दौरान समायी हुई है, पाइलोन पर स्थापित है, पीछे के आवास में स्थित है और खुलती है (ऊपर दिए गए ईटीए के चित्र में मोटर के साथ देखें), यह है कि अगर मोटर देर से फिर से शुरू होता है, तो स्टेम्मे के मामले में, जहाँ हेलिक्स केवल घूर्णी बल के प्रभाव से खुलता है, तो यह तुरंत अपने आवास में समाया जाता है, नए स्टार्टर के लिए प्रतीक्षा करता है। इंतजार के दौरान, विमान अपनी फाइनेस और गिरने की दर (ऊर्ध्वाधर गति) के प्रदर्शन को बनाए रखता है। लेकिन जब भी पाइलोन पर स्थापित हेलिक्स वाला मोटोप्लेनर अपने प्रोपुल्सर को बाहर निकालता है, उसे जल्दी से चालू करना आवश्यक है, नहीं तो यह समूह, जो एक मजबूत प्रतिरोध उत्पन्न करता है, अपने प्रदर्शन को खराब कर देता है, और "इलाज" समस्या को बढ़ा देता है।
वास्तव में, उन लोगों के अनुसार जो इसका उपयोग करते हैं, बहुत कम मामले हैं जब कोई मोटोप्लेनर चालक एक बहुत खराब स्थिति में अच्छी तरह से उड़ान भर सकता है, यदि वह पहाड़ों में एक तीव्र गिरावट में फंस जाता है। ऊपर उठने की गति (2.5 मी/सेकंड) बहुत कम है।
चुनौती: एक इलेक्ट्रिक विमान के साथ अटलांटिक महासागर की यात्रा: डेविड बनाम गोलियाह
इलेक्ट्रिक विमानों के क्षेत्र में, बर्ट्रैंड पिकार्ड के सौर इम्पुल्स पर बहुत मीडिया और बहुत शक्तिशाली स्पॉन्सरशिप के साथ एक बहुत चर्चित परियोजना है। एक खोज करते हुए, मुझे एक वीडियो मिली जो दो बहुत अलग परियोजनाओं को प्रस्तुत करती है: पिकार्ड की और एक निश्चित जीन-लुई सुलियर की, जिसे न तो स्पॉन्सर किया गया है और न ही मीडिया में चर्चा की गई है। मैं अपने पाठकों को सुझाव देता हूँ कि उन्हें पहले एक शो में बनाई गई छोटी रिपोर्ट को देखना चाहिए, जहाँ सुलियर की एक उपलब्धि, दो इलेक्ट्रिक मोटरों से संचालित क्री क्री और पिकार्ड की टीम के सौर इम्पुल्स का मॉडल प्रदर्शित किया गया था।
यूरोन्यूज़ की सौर उड़ान पर रिपोर्ट, अनुसंधान और नवाचार के शो में
पिकार्ड की परियोजना से शुरू करते हैं। जैसा कि सभी जानते हैं, विशाल बजट, 65 कर्मचारी जो कई वर्षों तक पूर्ण समय के लिए भुगतान किए गए, शक्तिशाली स्पॉन्सरशिप, बहुत बड़ा मीडिया बैटेज। हमें प्रारंभिक परियोजना की तस्वीर मिलती है, जो अधिक दायरे में है, जो बिना रुके एक चक्कर में दुनिया भर की यात्रा करने की बात करती है, जब विमान अनिवार्य रूप से दो सीट वाला था।

बर्ट्रैंड पिकार्ड की प्रारंभिक परियोजना, दो सीट वाली, छोड़ दी गई
ऊपर उल्लिखित अमेरिकी कंपनी हेलियोस के मशीनों के बारे में बात की गई थी। सामान्य बिंदु: धीमी गति, इसलिए लंबी उड़ान की अवधि (हेलियोस के उत्तराधिकारियों के लिए अनंत, जिन्हें वास्तव में वाणिज्यिक वायुमार्गों की ऊँचाई से ऊपर उड़ान भरने वाले प्रेक्षण मंच के रूप में डिज़ाइन किया गया था, जो मौसमी अस्थिरता से बचने की अनुमति देता है)।
हेलियोस की गति: 45 किमी/घंटा। भूमध्य रेखा पर, पृथ्वी की परिधि: 40,000 किमी। इसलिए इस अक्षांश पर एक चक्कर लगाने में लगभग 1000 घंटे का क्रम है: एक महीने से अधिक। अधिक उच्च अक्षांश पर कम।
पिकार्ड की मशीनों की गति: 70 किमी/घंटा। एक मध्यम अक्षांश पर, बिना रुके दुनिया भर की यात्रा लगभग तीन सप्ताह के लिए है। इसलिए दो लोगों को इस पूरी अवधि में एक केबिन में रहना होगा, जिसे गर्म और दबाव वाला बनाया जाना चाहिए। इस तरह की व्यवस्था गुब्बारे में ले जाए गए कैप्सूल में काफी संभव थी, जिसमें हीलियम के उपयोग और प्रोपेन बोतलों के साथ मोंगोल्फियर के रूप में काम करने के लिए जुड़ा हुआ था, लेकिन इस तरह की व्यवस्था एक सौर विमान के लिए बहुत भारी होगी।
बर्ट्रैंड पिकार्ड, चिकित्सक-मनोचिकित्सक और एवियेशन उपयोगी
( "डेल्टा पंख" के प्रणेता, यूरोपीय एयरोबैटिक चैंपियन)
एक बार बर्ट्रैंड पिकार्ड - ब्रायन जॉन्स के द्वंद्व ने 1999 में गुब्बारे के साथ एक चक्कर लगाया (40,000 किमी 17 दिनों में तय किए)।

ब्रेटलिंग ऑर्बिटर III। 18,000 मीटर क्यूबिक हीलियम
यह एक उपलब्धि है, जैसे एवरेस्ट की पहली चढ़ाई, लेकिन यह यात्री के लिए नियमित गुब्बारे सेवा के लिए नहीं जाता है। गुब्बारे के पायलट को अपनी दिशा और तीव्रता के साथ अनुकूल हवाओं की खोज करनी होती है। हम कह सकते हैं कि ब्रेटलिंग ऑर्बिटर III का वास्तविक पायलट ... जमीन पर रहा। यह मौसम सेवा के निर्देशक था। जेट स्ट्रीम के उपयोग से गुब्बारे को 250 किमी/घंटा तक की चोटी मिली।
वायुमंडलीय संरचना हमेशा बहुत जटिल होती है, जिसमें हवा की दिशा बदलने वाली परतें होती हैं। मुझे एक मोंगोल्फियर में उड़ान के अनुभव की याद है, जहाँ ऊंचाई को समायोजित करके हम एक सुबह के हवा के साथ बदल सकते थे, जो धूप में गर्म हुए पहाड़ी ढलान के साथ थोड़ी ऊपर की ओर चलती थी, लगभग उत्तर की ओर, और ऊंचाई पर हवा दक्षिण-पश्चिम की ओर चलती थी। इन दोनों हवाओं के उपयोग और ऊंचाई के बीच बदलाव के साथ, हम एक सुखद प्रांत के करीब आ सके।
याद रखें कि यह हीलियम-मोंगोल्फियर संयुक्त गुब्बारा 55 मीटर ऊंचा है और उड़ान के समय 8 टन भार वाला है। यह दो लोगों के लिए जीवन मॉड्यूल ले जाता है, जो सौर बैटरी के माध्यम से ऊर्जा प्रदान करता है। स्पॉन्सर घड़ी निर्माता ब्रेटलिंग है, जो इस परियोजना के लिए तीन मिलियन यूरो खर्च करता है। उनके लिए यह एक अद्भुत विज्ञापन अभियान होगा।
एक "सौर" दुनिया भर की यात्रा को दोहराने में वजन के अनिर्णयी बाधाएं थीं। इसलिए पिकार्ड ने एक छोटे से प्रोजेक्ट की ओर लौट लिया: एक विमान को सिर्फ सौर ऊर्जा का उपयोग करते हुए एक दिन और एक रात तक उड़ान भरने में सफलता प्राप्त करना, जिसमें दिन के दौरान एक हिस्सा ऊर्जा को बैटरी में संग्रहीत करना होगा, ताकि रात के दौरान उड़ान बनाए रखी जा सके। यह 2005 में एक अनिर्देशित उपकरण, जिसकी फैलाव 5 मीटर थी, जिसे निर्माण किया गया था
एलन कोकोनी (AC Propulsion)
2005 में, एलन कोकोनी ने 5 मीटर के मॉडल को 48 घंटे लगातार उड़ान भरी, दिन के दौरान बैटरी को चार्ज करके रात के उड़ान को सुनिश्चित किया
पहले, एलन कोकोनी ने 1000 किलोग्राम से कम वजन वाली इलेक्ट्रिक कार की गति के रिकॉर्ड पर ध्यान केंद्रित किया था

**एलन कोकोनी का "व्हाइट लाइटनिंग"। 1997 में 400 किमी/घंटा। **
सरल टिप्पणी: सौ किमी/घंटा (जो उस समय मनुष्य द्वारा प्राप्त की गई अधिकतम गति थी) के बारे में एक इलेक्ट्रिक कार, "जमैस कंटेंट" ने 1899 में पार कर लिया। इसलिए एक सदी में गति में चार गुना वृद्धि हुई।

जमैस कंटेंट, बेल्जियन कैमिल जेनाट्जी, 1899 में 105 किमी/घंटा, एक टन, 68 घोड़े की शक्ति
जेनाट्जी और अन्य लोग इलेक्ट्रिक टैक्सी के बाजार में लड़ रहे थे, जिन्हें आगे वाले एक्सप्लोजन मोटर के उदय के साथ तुरंत बाहर कर दिया गया।
अब पिकार्ड की परियोजना पर वापस आते हैं। वह और उनकी बड़ी टीम एक चार मोटर वाले एकल सीट वाले विमान की ओर बढ़ रहे हैं, जिसका केबिन दबाव नहीं है, जो 8500 मीटर से अधिक की ऊंचाई पर उड़ान भरने के लिए तैयार है। हम एलियस के फ्लटर के विरोध में नियंत्रण द्वारा 72 फ्लैप्स के साथ नियंत्रण नहीं करते हैं, जैसे हेलियोस में (विस्तार 32)। यहाँ विस्तार अधिक सामान्य है, प्लेनर 5 20 और अधिक के समान है। एक मजबूत लंगर (जो पंख की मोटाई तय करता है) कठोरता सुनिश्चित करता है।
पिकार्ड की परियोजना का एकल सीट वाला संस्करण
मीडिया बैटेज के अलावा, जो संचार बजट के कारण है, इस उड़ान में कुछ भी बहुत अद्वितीय नहीं है। सौर उड़ान में एक उपलब्धि पहले 1981 में पॉल मैकक्रेडी द्वारा की गई थी, जिन्होंने अपने सोलर चैलेंजर के साथ 2.5 किलोवाट विकसित किए, जो लगभग 3 घोड़े की शक्ति (एक घोड़ा की शक्ति 736 वाट के बराबर है) से अधिक थी, जो 5 घंटे तक उड़ान भर सकता था और सौ किलोमीटर की दूरी तय कर सकता था। ऊपर प्रस्तुत अंग्रेजी-चीनी विमान इसका विस्तार है।
पॉल मैकक्रेडी का सोलर चैलेंजर
प्रोफाइल दृश्य
**सोलर चैलेंजर, चैनल की यात्रा के दौरान ऊपर से दृश्य। **
पिकार्ड द्वारा लक्ष्यित उपलब्धि, सोलर इम्पुल्स से आगे, एक तीन दिन और तीन रात की उड़ान है, 70 किमी/घंटा की गति से, अभी भी एकल सीट वाले, दबाव वाले केबिन के साथ, जो 5000 किमी की यात्रा करता है, जिससे महासागर पार करने की अनुमति मिलती है। इसके बाद, पिकार्ड की टीम एक चक्कर लगाने की योजना बना रही है, जिसमें कई स्थानों पर रुकना होगा, क्योंकि एक मानव को 72 घंटे से अधिक समय तक इस तरह की मशीन के नियंत्रण के लिए नहीं बनाया जा सकता है: प्रत्येक स्थान पर चालक का बदलाव।
जीन-लुई सुलियर ने अपना प्रस्ताव रखा, "एटिंसेल" परियोजना के साथ, जिसमें एक मोटर वाला क्री-क्री उपयोग किया गया था जो उसके परीक्षण के लिए बैंच के रूप में काम करता था।

जीन-लुई सुलियर, 58 वर्ष, इलेक्ट्रिक मोटर वाले क्री क्री MC15E के नियंत्रण में बैठे हुए
व्यक्ति सहज है, आप कह सकते हैं कि उन्हें दबाव नहीं लगता है। वे एक पुरानी गाड़ी में चलते हैं, रोशनी से बचते हैं। मैंने उनसे एक सुंदर तस्वीर प्राप्त नहीं की और मुझे इसे ऊपर दिए गए वीडियो में ढूंढना पड़ा, बढ़ाना और संपादित करना पड़ा।
कोई स्पॉन्सर नहीं। उन्होंने अपने खुद के धन के साथ 200,000 यूरो तक वित्त पोषित किया, जिसमें वर्ष दर वर्ष अपने निजी उड़ान चालक के बचत को खर्च किया। उनका पहला कार्य, अपने डिजाइनर की सहायता से, 1973 में मिशेल कोलोबैन द्वारा बनाए गए प्रसिद्ध और छोटे क्री-क्री को इलेक्ट्रिक मोटर से लैस करना था।

क्लासिक क्री-क्री, दो मोटरों के साथ 15 घोड़े की शक्ति (22 किलोवाट)
दुनिया भर में सैकड़ों उपयोग में हैं
उड़ान मेंhttp://video.google.fr/videosearch?q=Cri+Cri&oe=utf-8&rls=org.mozilla:fr:official&client=firefox-a&um=1&ie=UTF-8&ei=Bjx4StnMCc-i_QaWqKmKBg&sa=X&oi=video_result_group&ct=title&resnum=8#
5 मीटर फैलाव। उड़ान गति 220 किमी/घंटा। खाली भार (70 किग्रा): अपने उपयोगी भार से हल्का, अपने चालक। कोलोबैन ने इस मिश्रित यान को पूरी तरह से बनाया, जो वोल्टिज़ ( + 4.5g, - 2.5g) कर सकता है। उन्होंने खुद पंख के लंगर को थकान के लिए परीक्षण किया, जिसे एक ड्रिल से चलने वाले एक एक्सेंट्रिक के माध्यम से 10 करोड़ बार घुमाया गया।
यहाँ सुलियर द्वारा संशोधित यान है, जिसमें प्रत्येक 15 किलोवाट के दो इलेक्ट्रिक मोटर लगे हुए हैं।

**इलेक्ट्रिक क्री-क्री, दो इलेक्ट्रिक मोटर से लैस। आगे का हिस्सा बैटरी के ल
नहीं, यह वह नहीं है। मैं गलत तस्वीर ले रहा हूँ...

नया बच्चा। प्रोपेलर के कवर के दोनों ओर ठंडा करने की छिद्रें दिखाई दे रही हैं। विनॉन में खींची गई तस्वीर
विमान का डिज़ाइन मिशेल कोलोम्बानी ने किया था, और (कोर भाग) जैक्स लाब्रूस ने बनाया था। मोटर का अनुकूलन लीन-लूस सूलियर ने किया था
विमान का अधिकतम वजन 200 किलोग्राम है (MTOW - अधिकतम उड़ान भार)
यह वर्तमान में सबसे अधिक कार्यक्षम मानव निर्मित विद्युत उड़ान वाहन है। मोनाको-नीस पहली डाक सेवा के प्रस्ताव (अतः अंतरराष्ट्रीय)
इस वायु पत्राचार समारोह के लिए जारी किया गया डाक टिकट
2011 में कई प्रतियोगिताओं के इंतजार में, विनॉन में पहली उड़ान, एक घंटे की उड़ान के साथ:
विनॉन में पहली उड़ान, एक अच्छे निशान के बाद

इन अद्भुत उड़ान वाले पागलों को अपनी अजीब मशीनों में...

अगला अपडेट देखना है ---