未命名ドキュメント
電気飛行機
2009年8月6日
2009年9月12日更新。電気クリクリの初飛行。ジャン=ルク・ソリエールが操縦

****2010年10月2日更新
今日私たちが生きている時代は、電気自動車に続く電気飛行機の時代をもたらしています。電気自動車の成功と失敗について少しくらい目を通してみてください:
電気自転車に関する簡単な説明といくつかのデータ:

バッテリー:パナソニック イオンリチウム 容量:8 Ah 26v 範囲:50〜70 km;3段階の補助 時間:3時間 モーター:ペダル内、180w フレーム:都市用アルミニウム;サイズ:45cm フォーク:スチール シート:Kinetic ホイール:26'' アルミニウム ブレーキ:V-brake 前後 ベルト:Nexus 3 自動切替 タイヤ:26 x 1.75 空間:175 x 65 cm 重量:22 kg
中国では、自転車のバッテリーの2つの要素のうち1つは取り外しが可能です。従って、仕事から帰宅したとき、自宅で充電することができます。職場でも同様です。バッテリーの取り外し可能な特性により、車両の航続距離が増加します(モデルによっては50〜70キロメートルです)。電気自動車の理想的な形について考えるとき、いくつかの問題が生じます。この車両が2人乗りであり、買い物に使えることなどが望ましいです。スマートのような小さな車と比較すると、電気自動車は完全に無公害であり、商業施設の内部に進入でき、地下通路を通り、どこへでも行けます。さらに、都市間輸送にこのシステムを統合することも考えられます。
これにより、異なる推進方式を備えることには全く問題がなく、熱機関による推進が補助的なシステムとして機能します。私は中国の小さな三輪車を参考に、以下のような提案をします:

2人乗り電気三輪車
この2人乗りの三輪車(中国のモデルを参考にしています)は狭く、スペースを取らないです。車体(中国では軽量合金とアクリル)は一部取り外しが可能です。単なる電気自転車よりも大きなバッテリーを持っていますが、ユーザーがどこへでも持ち運んで充電できる取り外し可能な要素があります。駐車場や充電スタンドにコンセントを設けることも可能です。
バッテリー:パナソニック イオンリチウム 容量:8 Ah 26v 範囲:50〜70 km;3段階の補助 時間:3時間 モーター:ペダル内、180w フレーム:都市用アルミニウム;サイズ:45cm フォーク:スチール シート:Kinetic ホイール:26'' アルミニウム ブレーキ:V-brake 前後 ベルト:Nexus 3 自動切替 タイヤ:26 x 1.75 空間:175 x 65 cm 重量:22 kg
電気エネルギーの貯蔵において、ここ数十年で大きな進歩がありました。今日では、家庭用の電動ドリルはすべて充電可能なバッテリーで動作しており、これは数十年前には考えられなかったことです。中国はこの分野で後れを取っていません。
太陽光センサーの効率は20%を超えました。
この「超軽量」の分野では、マッカレディの名前がすぐに挙がります。
ポール・マックレディ
彼の後ろにある奇妙な車両は一体何でしょうか?これは1987年にオーストラリアの太陽光自動車レースで彼が勝利した電気自動車です。後続の競合者より1日早く到着しました(...)

1987年のポール・マックレディの太陽光自動車、オーストラリアレース
もっと流線型で、これ以上は無理。オーストラリア横断;3500キロ、最高速度113キロ/時
前面のカバーを取り外した状態

パイロットの位置と後部カバー
ご覧のように、後部上部はすべて太陽電池セルで構成されています。車両は平らなパネルに置かれていて、補強材が使われています。車両の形状により揚力が得られ、車両の重量が減ります。
1925年に生まれました。16歳で単独飛行をしました。1941年、23歳で米国バードフライトチャンピオンとなりました。フランスで世界バードフライトチャンピオンとなりました。
その後、彼は自らのパイロットが発する筋力で飛行する最初の飛行機を設計しました。Gossamer Condorです。
Glossamer Condorの3ビュー図
マックレディは、揚力の支えとなる安定板を備えた「カナード」形式を選びました。なぜなら、翼の揚力はピッチングモーメントを伴うからです。私のマンガ「もし飛べたら」をサイトhttp://www.savoir-sans-frontieres.comで無料ダウンロードできます。33言語で350以上のマンガが利用可能です。
3年間の会社で、どのメディアも一度も話題にしなかった
軽量化のため、マックレディは前部のキールに翼のワイヤーを選び、これによりロングロンが軽くなり、曲げの負荷のみを受けるようになりました。

Glossamer Condor:初飛行
自転車と同じくらい速い.....

Glossamer Albatrosがチャネルを横断
これらの飛行は「地面効果」で行われます。サイクリストはハンドルを使って、まず支えを取って、次に前尾翼の揚力を調整し、最後に前尾翼を傾けて軽く旋回します。翼の傾きはロールによって保たれています。翼にはエアロフォイルはなく、急な旋回は設計されていません。
次に、マーカス・レディの息子で13歳、40kgの少年が、3900個のカドミウムニッケル太陽電池を備えたGlossamer Penguinで、1974年に初飛行を行いました。機体の空荷重量は34kgでした。発射装置により機体は地上を離れます。
1974年の太陽エネルギーによる初飛行。常に自転車と地面効果
13歳のマックレディの息子、太陽エネルギーで飛行した最初の人間

13歳のマーシャル、離陸中
しかし、ナサが後を引き継ぎ、1981年にマックレディがSolar Challengerを飛ばしました。出力:2.5kW
ポール・マックレディのSolar Challenger
ここでは状況が完全に変わります。より太いシルエットで、乱気流に耐えるように設計されています。
プロフィールから見ると、エアロフォイルがあります。
機体の尾翼は、翼のピッチングモーメントをバランスさせるためのデフォルトのプロファイルを持っています。上部は完全に平らで、多くの太陽電池パネルを載せています。
Solar Challenger、上から
固定部がパネルを支えています。可動部は白い帯のように見え、パネルを持っていません。フランスからイギリスまでの300キロを飛行し、1981年7月に5時間23分間飛行しました。Gossamer Penguinの3倍の重量(パイロットを除く)、16,000個の太陽電池パネルを備え、2つの電動モーターをタービン形式で搭載し、それぞれ3馬力で、サマリウムコバルト磁石を備えています。新しい材料の進歩により、機体は非常に強度が高く、軽量で、可変ピッチプロペラを備えています。
質的な飛躍は非常に大きいです。
材料のハイテク性を除けば、長距離の太陽飛行は完全に実現可能であり、機体の形状は通常の飛行機とほぼ同じで、例えば翼のスパンなどです。しかし、これはマックレディが今興味を持っていることではありません。彼は無人航空機(UAV)を設計することを考えています。これは昼間に30キロの高度に達し、夜間に滑空しながら若干下がり、蓄電した電気エネルギーの一部を放出し、無限に飛行できるようにします。
彼は次に「尾翼なし」の高スパンの飛行機に焦点を当てます。これはロングロンの柔軟性によって乱気流を吸収し、大きなディーディアを許容します。飛行機の安定性は、翼の後縁全体に設置された多数のスラットを操作するボードコンピュータに委ねられています。これにより、空力弾性効果を制御します。
****プロジェクト全体(英語のPDF)
30キロ(100,000フィート)の高度は実際に達成されました。太陽光センサーの効率は20%を超えています。機体は自力で離陸できます。さまざまな形式が順次導入され、太陽光のみから、バッテリーにエネルギーを搭載する、または水素燃料電池で電気を生成する混合システムまで、多様なシステムが使用されました。
1990年代半ば、ナサはドライデンのテストセンターからERAST(環境研究航空機とセンサー技術)プログラムを開始しました。研究と開発はマックレディが設立したAero Vironment社によって行われました。
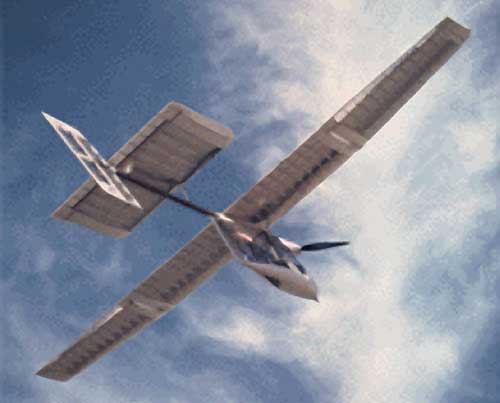
最初の機体はPathfinderです。30メートルの翼長、6台のモーター。バッテリーで飛行した後、太陽光センサーで飛行しました。1995年に17,000メートル、1997年に23,000メートルの高度に達しました。

Pathfinder:30メートルの翼長、8台のモーター
翼は揚力を得るためにピッチングモーメントを伴います。このタイプの機体の翼のプロファイルは進化しています。翼の中央部は最も「揚力」があり、正の曲率を持っています。翼端はS型の自己安定性のあるプロファイルで、この写真で明確に見えます。これらの翼部品は揚力が低くなります。これはマックレディが「尾翼なし」の単一翼飛行機の設計に至るための解決策です。飛行制御のコンピュータによる制御に多くの期待が寄せられました。
Pathfinderのプロフィールから見ると、ディーディアがあります
ナサはその後、1996-1998年のCenturion(14台のモーター、70メートルの翼長)のプロトタイプに移行しました。この機体は100,000フィート(30キロメートル)の高度に達するように設計されました。
Centurion(1996-1998)。70メートルの翼長、14台の電動モーター。
写真は下から撮影されています。後部のプロファイルには、透過性があり、細い筋が見えます。これは、翼の品質試験や飛行性能の評価を示しており、高価な太陽光センサーが欠如している状態です。上部と下部は、マックレディが以前に設計した機体と同じように、薄いミラーフィルムで覆われています。
他に何が見えますか?
14台の電動モーターが動作しており、直径2メートルの2枚羽のプロペラが見えます。おそらくバッテリーで駆動され、比較的短い飛行に適しています。各モーターは1.5kWの出力を発揮します。翼の前半分は不透明です。ここに構造の主要部、ロングロンがあります。このロングロンの前には、ポリスチレンフォーム(ミラーフィルムで覆われた)で作られた軽い翼端縁が延長されています。
後で見るように、Centurionは太陽光センサーを備え、14台のモーターを備えたまま、追加の中央部を追加して、Helios HP01に変換されました。これは太陽光で駆動するモーターを備え、最大限に軽量化され(1160kg、翼面荷重5kg/m²)、非常に高い高度に達することができるかどうかをテストするための機体です。テストは成功しました(30キロメートルの高度)。
後で見るように、HP03バージョンは2回目の飛行中に破壊され、その原因を説明します。浮遊する破片を観察すると、ロングロン、おそらく円筒形で筋が入っている構造が見えます。マックレディはこのロングロンに機体のすべての機械的耐力を集中させ、それ以外は装飾に過ぎないと考えているようです。この翼の驚くほど広い翼長(スパン:30)と、ワイヤーが一切ない状態を見ると、どうしてこの翼が「空力弾性」現象を乗り越えることができるのか疑問に思うかもしれません。この現象は比較的簡単に理解できます。わずかな乱気流で、翼の先端が揚力を得ます。局所的な迎角が高まり、翼の一部が上昇し、曲がります。その後、構造の弾性反応が元の位置に戻ろうとします。その結果、機体は「翼を動かし」始め、この瞬間はさらに拡大して破損に至ります。
多くの飛行機製造業者が、あらゆる種類の機体でこの種の問題に直面しました。飛行機の初期には、トラクションを発生させるワイヤーで解決しました。これは、構造の内部の機械的品質が向上するにつれて、飛行機はこの実に複雑なワイヤーのネットワークから解放されました。ナサの機体にはワイヤーが一切ありません。ロングロンがこの「空力弾性」のすべての力を打ち勝つことができるのか疑問に思うかもしれません。これは難しいように思えます。
別の方法でこの現象を乗り越える方法は、翼を「アクティブ」、「スマート」にすることです。下に示すグラフでは、機体が「ピッチレート(インクレメントの変化率)」を記録しており、これは飛行制御にとって重要なデータです。翼はロングロンの円筒形に加速度角やねじれを検出するセンサーで満たされています。これらはコンピュータに送られ、すぐに多数の72個のスラットを操作します。これらのスラットはすべての後縁(長さ1メートル)を覆っています。これらは機体のロール制御だけでなく、空力弾性の傾向を抑えるだけでなく、この危険な翼の振動を抑えるためにも使用されます。英語では「flutter」と呼ばれます。これは鳥の翼の振動を意味します。
機体の旋回は、モーターへの出力の差別的な制御(飛行中:1.5kW/モーター)によって行われます。したがって、垂直尾翼は必要ありません。ロールは「誘導ロール」によって自動的に行われます(旋回中の外側の翼は遅くなります)。機体の速度は38フィート/秒、つまり45km/hです。
米国の航空業界は数十年前にこの問題に直面しました。それは、最大の軍用輸送機(Lookeed Galaxyだったと思います)を導入しようとしたときでした。計算を最大限に慎重に行いましたが、機体は空力弾性現象に敏感で、翼を動かしながら飛行しました。この動きはそれほど大きくありませんでした:羽の先端で1メートル未満。しかし、この交互の変形は材料の疲労によって翼の寿命を大幅に短縮させました。
解決策は2つありました:
- 翼をゼロから再設計(非常に高価)
- 翼の空力弾性現象を抑えるスラットを装備
後者の解決策が採用されました。アメリカ人は、この日から、スラットを用いた翼の幾何学的制御の経験を手に入れました。これは、加速度計とコンピュータで制御されます。読者には明らかに、このような制御は手動では不可能です。非常に感度の高い加速度計が、局所的な迎角(または変形)のわずかな変化を検出し、すぐにスラットを操作してこの動きを制御します。これは人間には不可能な速さです。ボードコンピュータがなければ、Helios(元Centurion)は単に飛べません。
この面は、このような機体の「パイロット」の介入能力を大幅に制限します。パイロットは「すべてがうまくいくか」を制御するしかできません。彼が常にコントロールしているとは想像できません。すべては計算とプログラムによって予め計画されている必要があります。しかし、Helios HP03の破壊では、別の不安定性、すなわちピッチングの不安定性が予測されていましたが、その影響と発展の速さが過小評価され、ボードコンピュータが適切に対処できませんでした。コンピュータが適切な指示を出せたとしても、最初の「バースト」が機体を飛行領域から急速に外に出しました。しかし、私は先に進んでいます。
Centurionの円筒形のロングロンに戻りましょう。このロングロンは2つの種類の力にさらされています:
- 曲げ
- ねじり
Flutter(空力弾性)の現象では、ロングロンはすべての方向から力を受けます。乱気流での局所的な迎角の変化は、上下方向の曲げ力に変わります。しかし、同じく局所的な抗力の変化は前後方向の力に変わります。円筒形はすべての方向からの曲げ力を受けるため、最も適した形です。
しかし、空力学者は、揚力の変化がピッチングモーメントの変化を引き起こすことを知っています(私のマンガL'Aspirisouffleを参照)。この局所的なピッチングモーメントの変化は、非常に危険なねじり力の発生をもたらします。特にロングロンが非常に長い場合、その影響はさらに深刻です。私は、このロングロンが露出されている写真が、ロングロンの長さに沿ってフラッピングの拡散を防ぐための円形の筋が見えることを示していると思います。もちろん、コンピュータが翼のねじりの動きに即座に対応しない場合、ロングロンの破損は確実です。
ロングロン
私の考えでは、機体の完全なアクティブな制御がなければ飛行は不可能であり、乱気流や剪断に耐えることもできません。これらはあらゆる高度で発生します。低層では5000メートルまで、そして高い高度では予測不可能なジェットストリームの領域でも発生します。次の写真では、Heliosが完全に静かな気象条件ではなく、飛行していることがわかります。HP03の墜落時の別の写真では、遠くに積乱雲が形成されているのが見えます。また、それは6月で、冬ではなく、北半球での飛行です。もし冬の間、より静かな空気塊で試験を行っていたら、おそらく2回目の飛行でそれほど急激に終わらなかったかもしれません。
しかし、ナサは単にHelios HP01で達成した高度記録を目指しているのではなく、年間を通じて、あらゆる緯度で、高度15〜30キロメートルの成層圏で、非停止飛行を可能にする機体の開発を目指しています。
Centurionは中央部の追加によって修正され、翼長が82メートルに拡大され、14台のモーターを備えました。これにより、Helios HPO1に変換され、非常に高い高度での飛行の可能性を確認するための機体となりました。
Helios、14台のモーター、高度記録用に設定(最大限に軽量化)
62,000個の太陽光センサーを備え、2001年8月13日に97,000フィート(30キロメートル)の高度に到達しました。これは翼を備えた飛行機の絶対的な高度記録です。以前には、飛行機の翼が揚力を提供しない飛行機(ターボジェットやロケットエンジン、X-15など)が飛行中の飛行でより高い高度に達しました。
この高度では、大気圧は数ミリバール以下です。持続飛行を確保するには2つの方法があります:
- Helios方式:低速で、非常に低い翼面荷重(1m²の翼面あたり5kg):Heliosの高高度飛行では、翼面荷重は5kg/m²です。翼長82メートル。翼の弦長は8フィート(2.64メートル)。スパン比は82/2.64 = 31(....)。翼面積216m²。最大厚さ28cm。翼先端は発泡スチロール(ミラーフィルムで覆われた)で、Heliosの重量は1,160kg、最大限に軽量化されています(Helios HP03では、燃料電池システムを搭載したため、重量が2,320kgに増加しました)。速度は38フィート/秒、つまり12m/sまたは45km/hです。
- 高翼面荷重で、超音速(Aurora)で飛行
2003年、ナサは長期間の飛行(1〜2週間)を目標にし、水素燃料電池を用いて、50,000フィート(16,000メートル)の高度で夜間飛行を維持し、18キロワットの出力を発揮することを計画しました。Heliosの構成は変更されました。モーターは10台に減らされ、燃料電池は中央のナセルに設置され、翼端に追加のタンクが設置されました(各タンク7kg)。
長期間飛行用に設定されたHelios。矢印は翼端タンクを示しています
Helios HP03飛行中。翼端タンクに注意してください。
機体がプロフィールから撮影されているとき、翼のディーディアは印象的です。しかし、上の写真(後ろから3/4の角度で撮影された)や下の写真(ほぼ正面から撮影された)では、このディーディアが「非常に合理的」であることがわかります。

横風での着陸
このスパン比31が絶対的な限界であると考えるかもしれません。しかし、そうではありません。Heliosは、自分の剛性で大気の乱れに耐えるにはあまりにも軽すぎます。したがって、コンピュータで制御される72個のスラットを備えた「スマート」な翼にしました。しかし、より高い翼面荷重では、ドイツの二人乗りETA(ギリシャ文字エータの発音)が現れ、スパン比は...51になります!
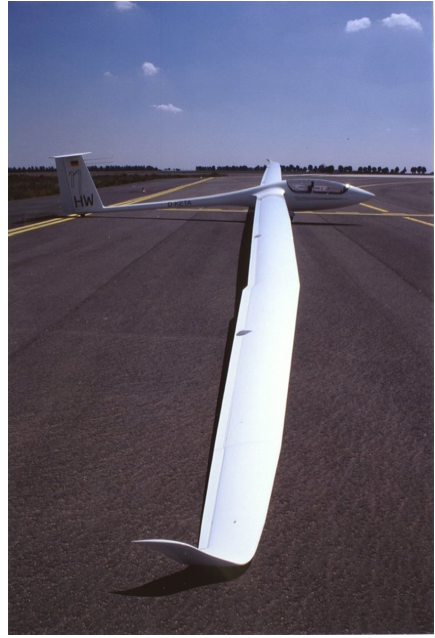
ETAのプロフィール
細さはスパン比に比例します。さらに先に、細さが50を超えるStemmeが登場します。ETAの細さは72です。つまり、1000メートルの高度を失うと、一気に72キロメートルを飛ばせます!
動力付きETA、エンジンを引き出した状態(64馬力のSolo 2625)
翼長は30メートルに達します。フルロード時の重量は950kgです。最大速度は270km/hです。2008年に初飛行しました。3台のETAが作られました。1台は試験中に旋回中に失われ、2人のパイロットはパラシュートを使用して脱出しました。
2010年10月2日:フランスの滑空機はもうありません
。私たちのセンターで飛行している滑空機の多くはドイツ製です。動力付き滑空機は急速に発展しています。その理由は2つあります。これらは、牽引機のサービスを必要とせず、所有者が使用できるようにします。昇力用のモーター(1分の準備時間)により、昇力速度は1秒あたり2.5メートルに達します。モーターが元の場所に戻ると、その存在は追加の抵抗をもたらしません。
しかし、このような上昇速度は、悪運のパイロットが強力な下降気流から脱出するのを妨げます。これは山岳飛行で時折遭遇するもので、1秒あたり5メートルを超えることがよくあります。
これらのモーターは、パイロットに追加の安全性と快適性を提供し、過度なリスクを避けることができ、飛行を「ローカル地形」から離れます。実際、気象が崩れ、積乱雲が消えても、モーターを再び使用して「牛」を避けて帰還できます。これは山岳地帯では不可能な場合があります。
よりスポーツ的ではないが、より安全です。
Heliosは飛行して破壊されるまでに2回飛行しました。最初は2003年6月7日、2回目は6月25日です。これはHelios HP03が墜落したときの上昇中の写真です:
Helios、2回目かつ最後の飛行中、護衛ヘリコプターから撮影
上昇率は0.5 m/s
プロジェクトのPDFを参照すると、非停止飛行の技術は非常に単純な原理に基づいていました。昼間は、機体に搭載された水の電解で、酸素と水素(圧縮)に蓄えられます。夜間には、電解で得られたガスが燃料電池に送られ、生成された水が再び貯蔵されます。この考えでは、問題の要素は圧縮機です。
Heliosの理論的な動作図
もっと単純、あなたは死ぬでしょう
この機体が飛行中に破壊されたことは知られています。これは、乱気流と剪断を経て翼が受けた過度な曲げ応力によるものであると予想されます。しかし、事故報告を調べると、原因はまったく異なります。実際に、この乱気流に突入したとき、翼は驚くほど大きなディーディアを獲得します:

Helios、乱気流でディーディアが増加し、ピッチング不安定性の動きを開始
この機体の破壊の原因は、ロングロンの破損ではなく、制御不能なピッチング不安定性の動きです。この機体は「空力弾性」現象にかかります。ディーディアが大きくなると、翼端にタンクを設置することで、ピッチングの慣性モーメントが増加します。飛行速度は38フィート/秒、約45km/hです。これは「三角翼」の飛行速度です。この機体はより高い速度には設計されていません。ピッチングの振動により、飛行記録器によると最大70km/hを超える速度に達します。この速度は、発泡スチロールで接着された翼先端部品に吸い込み効果をもたらし、すぐに剥がれました。翼のすべての外装、太陽電池パネルを含め、同じように剥がれました。
一方、ロングロンは問題ありません。翼は乱気流や空気の剪断によって破損したのではなく、ピッチング不安定性による過速度によって単に脱衣されました。
Hélios、海に墜落する直前

漂流する破片
事故报告 に関するヘリオスの報告書はやや混乱しています。私には、揚力面を軽くして、迎え角の慣性モーメントを増加させないが、この不安定性に対して「ダンピング」を生み出す十分な面積を持つような尾翼を追加することが、少なくとも検討されるべき解決策のように思えます。確かに、マッカレディーの名前はこの報告書には出てきていません。以下は、機体の迎え角における慣性モーメントの増加のグラフです。
上記は、衝突の読み取りです。グラフの中盤では、最初の翼端角の増加が見られ、コンピュータが対応しています。その後10分後(飛行時間全体:30分)に再び不安定性が現れます。翼端角は30フィート(10メートル)を超えます。機体は「翼をバタつかせる」(空力弾性不安定性)状態になります。急激な迎え角の振動(下の曲線)の後、速度が1秒あたり60フィートを超えて増加します。
ここでは、翼端の空力効果が翼端を外れさせ、翼の装備も同様に外れ、数秒後には... ロンゴンだけが残ります。報告書には、「コンピュータによる計算では、不安定性がこれほど迅速かつ激しく発展することを予測していなかった」と記載されています。
結論:この種の機体を運用する際のリスクは、主に突風の影響でロンゴンが破損するリスクに集中しているわけではありません。空力弾性不安定性もまた、同様に破滅的な役割を果たす可能性があります。
太陽電源飛行機の分野から離れて、電池に蓄えられたエネルギーで飛ぶ電動飛行機の分野に移ります。これは成長中の市場です。ここでも決定的なポイントが見られます。2007年12月にフランスの単座機が初飛行したことを挙げることができます。

フランスでの世界初の電動飛行機の離陸
2007年12月23日
****電動航空機促進協会
これは世界初の出来事で、APAMEは、25馬力の電動エンジンとリチウムポリマー電池を装備したエレクトラF-WMDJの初飛行を実現しました。
この初飛行は、先月23日にハイ・アルプス地方のアスプレ・シュル・ブイッシュ空港から行われました。48分間飛行し、閉路で50キロを飛行しました。
この飛行機の飛行は、レクリエーション航空分野において画期的な経験であり、15〜50馬力の出力が必要な飛行機に対して、現在の内燃機関に代わる画期的な代替手段を提供します。
機体の特徴:
単座機 翼幅:9 m 長さ:7 m 空荷重量(電池なし):134 kg 起飛最大重量:265 kg 巡航速度:90 km/h 細長比:13 木と布製の構造 電動プロペラユニットの特徴:
18 kW(25馬力)の直流ブラシ付き産業用モーター 電力電子機器はこの用途に特化して開発された リチウムポリマー電池(総重量:47 kg) 地面でピッチ調整可能なARPLASTプロペラ、この駆動システムに適しています パネル、出力コントロール、モーター台、モーターフラッシュなどは、この機体に特化して開発・製造されました。APAMEについて:2007年にアネ・ラヴラン氏の会長のもと設立されたAPAMEは、電動航空機の設計、製造、利用を推進することを目的としています。野心的なプロジェクトとして、小型電動飛行機の開発を計画していました。8月には、APAMEはすでに「静かに飛行」するULMを飛ばしていました()。
APAMEに問い合わせる 電話:04 92 57 99 40 ファックス:04 92 57 99 41 ウェブサイト:
これは世界初の出来事で、APAMEは、25馬力の電動エンジンとリチウムポリマー電池を装備したエレクトラF-WMDJの初飛行を実現しました。
この初飛行は、先月23日にハイ・アルプス地方のアスプレ・シュル・ブイッシュ空港から行われました。48分間飛行し、閉路で50キロを飛行しました。
この飛行機の飛行は、レクリエーション航空分野において画期的な経験であり、15〜50馬力の出力が必要な飛行機に対して、現在の内燃機関に代わる画期的な代替手段を提供します。
機体の特徴:
単座機 翼幅:9 m 長さ:7 m 空荷重量(電池なし):134 kg 起飛最大重量:265 kg 巡航速度:90 km/h 細長比:13 木と布製の構造 電動プロペラユニットの特徴:
18 kW(25馬力)の直流ブラシ付き産業用モーター 電力電子機器はこの用途に特化して開発された リチウムポリマー電池(総重量:47 kg) 地面でピッチ調整可能なARPLASTプロペラ、この駆動システムに適しています パネル、出力コントロール、モーター台、モーターフラッシュなどは、この機体に特化して開発・製造されました。APAMEについて:2007年にアネ・ラヴラン氏の会長のもと設立されたAPAMEは、電動航空機の設計、製造、利用を推進することを目的としています。野心的なプロジェクトとして、小型電動飛行機の開発を計画していました。8月には、APAMEはすでに「静かに飛行」するULMを飛ばしていました()。
APAMEに問い合わせる 電話:04 92 57 99 40 ファックス:04 92 57 99 41 ウェブサイト:
単座機、25馬力、48分間、閉路で50キロ、時速90キロ ---
世界初の商業用電動飛行機は…英中合作
http://www.avem.fr/actualite-le-premier-avion-electrique-commercialise-en-2010-874.html


Yuneec E 430は、後部座席の横に配置された双座機で、空力設計が非常に工夫されています。
翼は非常に長い、これは抗力の削減を意味します。

非常に長い翼(ウィングレットを含む)ですが、格納庫への設置が容易です
興味深いのは飛行時間の性能で、2人で時速90キロで飛行します:
2時間
販売価格は65,000ユーロで、これは二人乗りのレクリエーション飛行機としては過剰ではありません。これは中国で製造されていますが、中国では販売できません。なぜなら、中国の空域はレクリエーション航空には開放されていないからです。
ここでは、小型飛行機の利用範囲に大きく含まれています。これは学校用や地方飛行に使用できます。その形状と非常に長い翼の設計により、クリクリのエンジン搭載機とは異なり、モーターパラグライダー(低出力エンジン、または三枚羽根の旗のようなプロペラ)のようになります。当然、自力で離陸します。
ジャン=ルク・ソリエールによる評価
: 「これは最大重量450kgのクラス(国際的な二人乗りULMクラス)です。約120kgの機体、150kgの乗客、180kgの電池、おそらくリチウムポリマーで、1kgあたり0.2kWhの容量があります。平均18kWの出力でこのモーターパラグライダーを飛ばすには十分です。これにより、2時間の航続時間が得られます。
電動モーターパラグライダーの分野には将来性があると思います。太陽電池によるエネルギー供給も考慮されます。モーターパラグライダーの分野では、ドイツのステム・S10のような機体が考えられます。これは、プロペラが前部のカバーに完全に収納され、遠心力によって展開される機体です。

ステム・S10、世界最高のモーターパラグライダー。後部座席の横に配置された双座機で、プロペラは収納可能。85kW(内燃機関)のエンジンが翼の下に設置されています。空気取り入れ口が開いています。電動式のランディングギア。最大速度270km/h、翼の長さ30。翼幅は…23メートル!取り外し可能でトレーラーで輸送可能。細長比は50以上。
満タンの燃料で飛行可能距離は…1000キロを超えます。しかし、機内に積載可能な物量は…象徴的(歯ブラシとパジャマ2人分)です。ここでは、
ステム・S10の飛行動画を紹介します。
友人のジャックが所有しており(私はビノンにベースがあるこの機体で飛行したことがあります)、私は、プロペラの収納機能、優れた滑空性能、電動モーター、太陽電池のセンサーを組み合わせた方法が興味深いと考えています。ETAと同じように、ステムは自力で離陸できます(ただし、長めの滑走路が必要です!その上昇速度は低めです)。これにより、牽引機に頼らなくても飛行が可能です。
純粋な滑空飛行機の愛好家であるジャック・レガラン氏は、離陸のみにエンジンを使用しています。しかし、空では下降気流に遭遇することがあり、私はヴェルドン渓谷の上を飛行した後、安全な距離を確保するためにエンジンを再び使用したことを思い出します。
他のすべてのモーターパラグライダーとは異なり、プロペラが飛行中に収納されているステムS10は、プロペラがピラーポストに取り付けられ、背中の収納部に設置されており、プロペラを展開します(上のETAの写真を参照)。もしエンジンが再始動に時間がかかると、プロペラはステムでは遠心力によってのみ展開されるため、すぐに収納部に戻り、新しい始動を待つことになります。その間、機体は滑空性能と降下速度(垂直速度)を維持します。一方、プロペラがピラーポストに設置されているモーターパラグライダーでは、プロペラを展開した後、すぐにエンジンを始動しなければなりません。そうでなければ、大きな抗力が生じ、性能が低下し、治療法が状態を悪化させます。
実際にこれらの機体を使用している人々によると、山岳地帯で強い下降気流に捕らわれた場合、エンジンを再始動して困難を乗り切ることは非常にまれです。上昇速度(2.5m/s)は低すぎます。
課題:電動飛行機で大西洋を横断する。ダビデ対ゴリアト
電動飛行機の分野では、ベルトラン・ピカール氏の太陽電池プロジェクト「ソーラー・インパルス」は広くメディアで報道されており、強力なスポンサーシップを受けています。調査を進めているうちに、ピカール氏のプロジェクトと、それほどスポンサーシップやメディアの注目を受けていないジャン=ルク・ソリエール氏のプロジェクトという、非常に異なる2つのプロジェクトを紹介する動画を見つけました。私は読者に、まずこのイベントで行われた短いレポートを見てもらうことをお勧めします。そのイベントでは、ソリエール氏の作品の一つである、2つの電動モーターで駆動されるクリクリと、ピカール氏チームのソーラー・インパルスのモデルが展示されていました。
まずはピカール氏のプロジェクトから始めましょう。誰もが知っているように、非常に高い予算、何年もの間、65人の従業員がフルタイムで働いており、強力なスポンサーシップと大きなマスメディアの宣伝があります。これは、当初のより野心的なプロジェクトのイメージであり、無着陸で世界一周を計画していたもので、当然ながら二人乗りでした。

ベルトラン・ピカール氏の当初の二人乗りプロジェクト、放棄されました
米国の企業がHeliosという機体を生み出し、その上記のプロジェクトと同様の特徴を持っています。共通点は、速度が遅く、飛行時間が長く(Heliosの後継機は、航空路の上空に飛行する観測プラットフォームとして設計されており、気象擾乱の影響を受ける低層大気から解放されているため、飛行時間が無限に近いとされています)。
Heliosの速度:45km/h。赤道付近、地球の周長:40,000km。この緯度で地球を一周するには、1000時間程度かかります。より高い緯度では、それより短い時間になります。
ピカール氏の機体の速度:70km/h。平均的な緯度で、無着陸で世界一周は約3週間です。この期間、2人が機内で生活しなければなりません。そのキャビンは加熱と圧力調整が必要です。これは、バルーンに搭載されたカプセルで、ヘリウムとプロパンボンベによるモンゴルフィエールの仕組みで浮力を得ていたので、可能でした。しかし、太陽電池飛行機では、このような仕組みは非常に重くなりすぎます。
ベルトラン・ピカール、医師で精神科医、航空家
(「デルタウィング」の先駆者、ヨーロッパのスロープチャンピオン)
1999年にベルトラン・ピカール氏とブライアン・ジョーンズ氏が、バルーンで世界一周を成功させたことを見てみましょう(40,000キロを17日間で飛行)。

ブレイトリング・オービターIII。ヘリウム18,000立方メートル
これは、エベレストの初登頂と同じくらいの偉業ですが、観光用のバルーンサービスにはなりません。バルーンの操縦は、風向きと強さに応じて有利な空気流を探すことで行われます。言い換えれば、ブレイトリング・オービターIIIの本当のパイロットは…地上にいました。気象サービスの調整者です。ジェットストリームの利用により、バルーンは最大250km/hの地表速度を達成しました。
気象構造は常に非常に複雑で、風向きが変化する層状構造です。私はモンゴルフィエールで飛行したことがありますが、高度を調整することで、朝の上昇風(太陽の照らす斜面に接する)と、南西方向の上空風を交互に利用し、快適な場所に近づくことができました。この二つの空気流を活用し、高度を交互に変えることで、快適な場所に近づくことができました。
このヘリウムとモンゴルフィエールの組み合わせは55メートルの高さで、離陸時の重量は8トンです。2人のための生活モジュールを搭載し、太陽電池で充電可能なバッテリーでエネルギーを供給しています。スポンサーは時計メーカーのブレイトリングで、このプロジェクトには300万ユーロを費やしています。これは、広告キャンペーンとして非常に成功しています。
太陽電池で世界一周を再現するには、重量の計算が非常に困難でした。ピカール氏は、より小規模なプロジェクトに焦点を当てました。つまり、太陽電池のみで飛行し、1日と1夜を飛行し、昼間に集めたエネルギーの一部を夜間の飛行に蓄えること。これは、2005年に無人機で実現されており、5メートルの翼幅を持った機体で、以下に示されています。
アラン・コッコーニ(AC Propulsion)
2005年にアラン・コッコーニは、5メートルのモデルを48時間連続で飛行させ、昼間にバッテリーを充電して夜間飛行を可能にしました。
以前、アラン・コッコーニは1000kg未満の電気自動車の速度記録に焦点を当てていました。

アラン・コッコーニの「ホワイト・ライトニング」。1997年に400km/hを達成しました。
簡単な補足:100km/hの速度(当時人間が達成した最高速度)は1899年に電気自動車「ジャマス・コンテント」によって達成されました。1世紀で4倍の速度向上です。

ジャマス・コンテント、ベルギーのカミーユ・ジェナティジー、1899年、105km/h、1トン、68馬力
ジェナティジーと他の人々は、「電気タクシー」市場で戦っていましたが、内燃機関の登場によりすぐに市場から駆逐されました。
ピカール氏のプロジェクトに戻ります。彼とその多数のチームは、非圧縮の単座4エンジン機を計画しており、飛行高度は8500メートルを超えない予定です。フラッタリングの耐性は、72のスラットによってコンピュータで制御されるため、Helios(翼の長さ32)のようにはしていません。ここでは、翼の長さはやや短く、滑空機5、20、さらにそれ以上と似ています。大きなロングン(翼の厚さを強制)が剛性を確保します。
ピカール氏の単座機プロジェクト
マスメディアの広告宣伝に伴う巨大な予算を除けば、この飛行はそれほど特筆すべきものではありません。太陽電池飛行の飛躍は、1981年にポール・マッカレディー氏のソーラー・チャレンジャーによってすでに実現されており、2.5kW(約3馬力)で、5時間飛行し、何百キロもの飛行が可能でした。上記の英中飛行機はその延長です。
ポール・マッカレディー氏のソーラー・チャレンジャー
正面から見た写真
ソーラー・チャレンジャーの上から見た写真、チャネルを横断中の様子。
ピカール氏の目標、ソーラー・インパルスを超えて、3日と3夜の飛行、時速70キロ、単座、圧縮キャビン、5000キロ、大西洋横断を可能にするものです。それ以上には、ピカールチームは世界一周を計画しており、多くの中継地を設け、人間が72時間以上にわたってこの機体を操縦することは困難であるため、各中継地でパイロットを交代する予定です。
ジャン=ルク・ソリエール氏もプロジェクト「エトゥネル」を開始し、クリクリを動力としてテスト機として使用しました。

58歳のジャン=ルク・ソリエール氏、電動モーターを搭載したクリクリMC15Eに操縦席に座っています
彼は控えめで、控えめな人物です。古びた自動車に乗って、スポットライトを避けます。彼から良い写真を手に入れることはできず、上記の動画から取得し、拡大し、修正しました。
スポンサーなし。彼は20万ユーロを自身の資金で投資し、年々商用飛行の貯金を費やしてきました。彼の最初の仕事は、彼の設計者と協力して、1973年にミシェル・コロンバン氏が作成した有名な小さなクリクリを、電動モーターで装備することでした。

クラシックなクリクリ、2つの15馬力(22キロワット)モーターで装備
世界中で何百台も運用されています
飛行中http://video.google.fr/videosearch?q=Cri+Cri&oe=utf-8&rls=org.mozilla:fr:official&client=firefox-a&um=1&ie=UTF-8&ei=Bjx4StnMCc-i_QaWqKmKBg&sa=X&oi=video_result_group&ct=title&resnum=8#
翼幅5メートル。飛行速度220km/h。空荷重量(70kg):自分より軽く、自分の荷物より軽い。コロンバン氏は、この機体を独自に設計し、スロープ飛行(+4.5g、-2.5g)が可能でした。彼自身が翼のロングンを疲労試験に使用し、電動ドライバーでエクセンタを操作して1億回の変動曲げを試しました。
ソリエールが改造したこの機体は、2つの15キロワットの電動モーターを搭載しています。

電動クリクリ、2つの電動モーターを搭載。前方はバッテリーを収納するために変更されています。
航続時間:45分、リチウムポリマー電池45kg
リチウム電池にはいくつかの種類があります。リチウムポリマー電池では、電解質がゲルに含まれています。クリクリ電動機に搭載されているこれらの電池は、重量1kgあたり0.2kWhの容量があります。
http://fr.wikipedia.org/wiki/Accumulateur_lithium

各モーターは、安全性を高めるために独自のバッテリーパックで駆動されます。電動モーターは排気管、点火線、シリンダーからの不要な抵抗をなくし、抵抗を45%削減します。2つのモーターが合わせて30kWを発揮できる場合でも、この「鉄のハト」は10kWで飛行でき、着陸時の15分の予備を考慮すると、総航続時間は45分になります。試験中です。
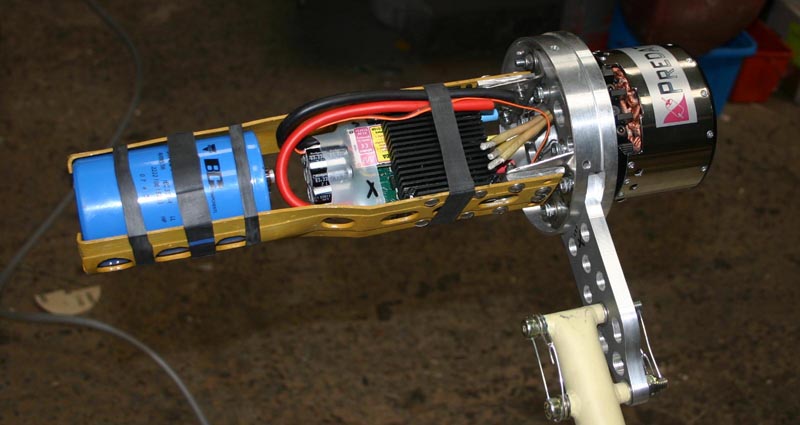
クリクリ電動機の1つのモーター、カバーなし。
右側はモーター自体、左側はコンデンサ、中央はバッテリーから供給される直流を「三相交流」(実際にはパルス形式)に変換するシステムです。
電動クリクリの初飛行
ジャン=ルク・ソリエールが操縦:

2009年9月8日、ジャン=ルク・ソリエールが操縦して初離陸

これらの素晴らしい飛行者たち、彼らの奇妙な機体で

飛行中、ダニエル・ミショーが操縦するヘリコプターからフィリップ・レーナードによって撮影
2010年10月2日:アップデート
上記の写真には、ソリエールがこの設計を放棄した原因となる欠点が見られます(後述)。電動モーターのシステムには強力な冷却が必要です。この設計では、プロペラのカバーに設けられた2つの空気取り入れ口によって冷却が行われます。これは、機体が移動している間のみ機能し、飛行前のテストには固定が必要です。

クリクリは1970年代初頭に作られました。それ以来、材料分野で大きな進歩があり、空力性能が向上し、重量が減少しました。炭素繊維が従来の軽合金に取って代わっています。このような進歩を示す機体の例として、クイックイーがあります。
1977年にトム・ジェット、ジーン・シーハン、有名なバート・ラタンが作成したクイックイーは、単座機で、翼幅5メートル、速度200キロ、空気荷重45キロ/平方メートル。総重量200キロ、175キロ/時で飛行可能な距離は950キロ。3000台が製造されました。

クイックイー

非収納式のランディングギアにより、抗力は最小限(脚のない)です。着陸時の地上効果は最大です。
実際には、多くの小さな単座機があり、先進的な技術を使用し、優れた性能を発揮しています。

アーノルドAR5、65馬力で340キロ/時
フランス製の完全な炭素繊維機体、タービン式のロタックスエンジン(100馬力)を搭載したタンドム式の二座機、空冷式、最近発表されました。前部ランディングギアのみが収納可能です。
LH航空のLH-10。10万ユーロのキット飛行機
飛行可能距離:1480キロ。速度:340キロ/時。前部ランディングギアのみが収納可能。 ---
太陽鳥プロジェクト(Sunbird)
これは…アラン・コッコーニ氏が2005年に5メートルの翼幅で飛行し、昼間に蓄えたエネルギーで夜間に飛行し、48時間連続で飛行した機体をもとにした架空のプロジェクトです。
翼幅を倍にし、8〜10メートルにすることで、同じタイプの機体を設計し、地球を一周し、さらに…無限に飛行できるようにすることができます。しかし、ブランドロゴで満たされ、ドル、ユーロ、スイスフランで飛行するのではなく、国際的で、匿名の資金で、地球人の太陽エネルギー利用の希望を担うものになります。このプロジェクトのコストは非常に手頃です。私は10年以上前からこのプロジェクトを考えていました。この機体は、通過するすべての国によって追跡され、ガイドされ、サポートされ、地上の画像を送信する小さなカメラを搭載して、低高度で検出可能になります。上空ではレーダーで検出され、機体に設置された3つの直交した金属板のレーダー応答機によって照らされ、撮影されます。昼間の上昇時や夜間の降下時にも同様です。航空会社の飛行機が交差し、乗客がこの太陽鳥を見ることができます。
このプロジェクトを成功させるには、アラン・コッコーニ氏が最も適しています。彼の経験があるからです。彼はすでにこのプロジェクトについて考えていたかもしれませんか? ---
この調査を終えるために、太陽電池で完全に動作し、ナノテクノロジーの最も進んだ技術を活用し、二酸化炭素を酸素と炭素に変換し、あらゆる汚染を伴わず、土壌固定、生分解性建材の合成、気候調整、栄養、健康、生物多様性の維持など、多くの利点をもたらす機体を紹介します。ナノテクノロジーの限界まで活用したこの機体は、さらに…自己複製可能です:
このページの上部に戻る、電動飛行機に関する包括的な記事 ---
2010年10月2日:アップデート
電動飛行機はジャン=ルク・ソリエールにとって20年間の夢の実現です。彼は航空機の分野で素人ではありません。プロのパイロットで、すべての飛行機を飛ばしました。インストラクターで、現在は貨物用のB757で中距離飛行を担当しています。ヘリコプター、水上飛行機、氷河飛行の経験もあり、合計14,000時間の飛行経験を持っています。数十年にわたり、美術館やクラブ、個人に向けた20台以上の飛行機の回収と修復に従事してきました。これは、国宝級の古物から、チェコの航空機から回収された超音速ミグ21まで、多様な飛行機を含んでいます。
頑なで、36頭のロバのように頑なで、最初のモーターで発生した過熱問題にもくじけず、彼は単発機に移行しました。
いいえ、これはそれではありません。私は画像を間違えました...

新しい赤ちゃん。プロペラカバーの両側に冷却エアインテークが見えます。ビノンで撮影
この飛行機はミシェル・コロンバーニによって設計され、ジャック・ラブロスによって作成(フレーム部分)されました。エンジンの改造はレイン・ルシエ・ソリエールによるものです。
飛行機の最大離陸重量は200kgです。
現在、操縦可能な電動飛行機の中で最も効率的なものです。モナコ-ニース間の初の郵便輸送プロジェクト(したがって国際的なもの)
この飛行切手は、この航空切手活動のために発行されました
2011年に多数のコンペティションが予定されています。最初の飛行はビノンで、飛行時間は1時間:
ビノンでの最初の離陸、良いポイントでの離陸後。

これらの素晴らしい飛行狂人、彼らの面白い機械で...

注目すべき出来事 ---